
Nat. Commun.: 机器人模仿蝌蚪进化获得新技能!
一个小蝌蚪只能在水里游,但是当它变成青蛙之后就可以拥有水陆两栖能力。同样的一个机器人,由于自己身体形状的限制,不可能擅长很多运动。但是机器人可以通过变形获取新技能。
传统变形机器人的弊端
然而,传统的形变机器人一直依赖于笨重的外部设备,如大型电机和传动机构,从而限制了它们的灵活性和多功能性。这与自然界的动物有着明显的不同,动物是通过肌肉来实现驱动,并且拥有丰富的感知和控制能力。
近期,耶鲁大学和科罗拉多州立大学的研究人员在世界著名期刊《自然-通讯》上发表一项创新性的研究,该研究彻底改变了传统机器人变形的方式。研究人员成功地将驱动、感知和锁定功能直接嵌入到机器人的内部结构,消除了外部硬件的笨重需求。
原理
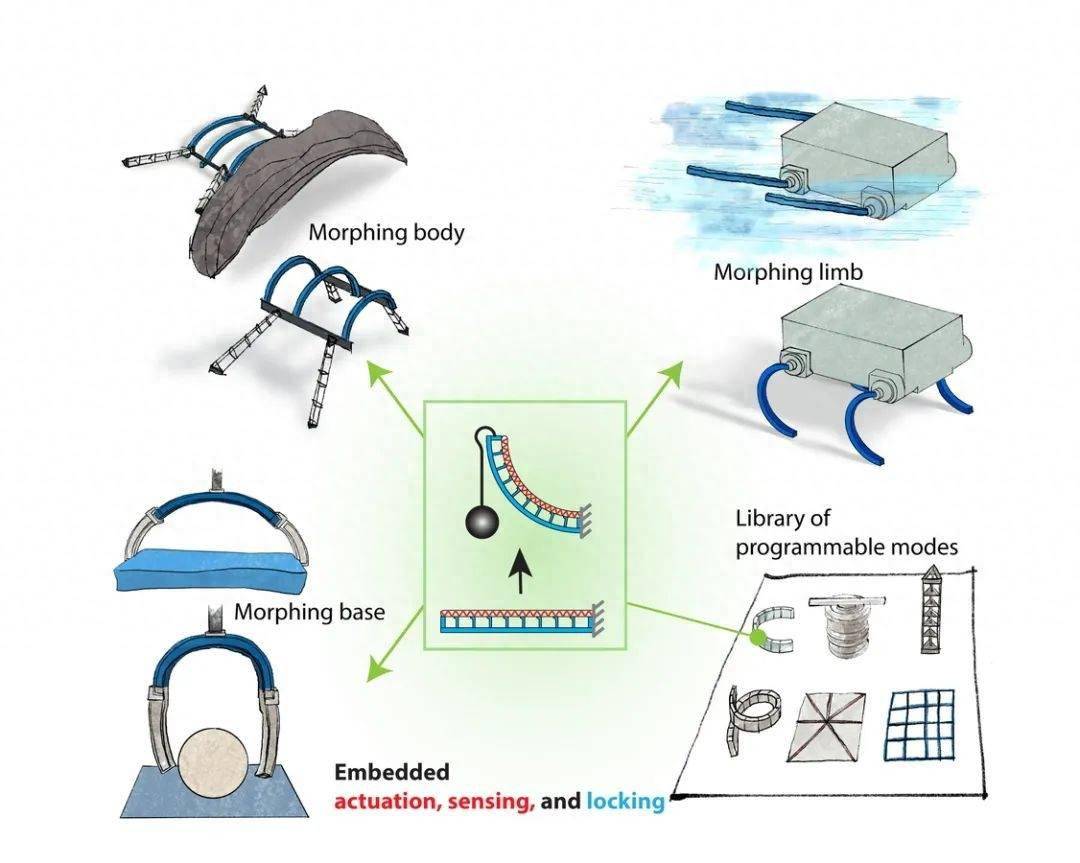
这一创新技术的核心在于将轻量级人工肌肉与形状记忆聚合物(SMP)相结合。人工肌肉可以在电流作用下产生收缩,,而SMP则可以在刚性和柔软状态之间切换,以锁定机器人的形状。这种方法的独特之处在于,它将所有这些功能完全嵌入到机器人的体内,无需复杂的机械结构和传动装置。
像人一样,这种机器人也可以能够感知自身的形状变化,实现精确的控制。

应用
这项嵌入式变形技术具有广泛的实际应用前景,并且具有彻底革命性的意义。研究团队已经展示了该技术在各种机器人系统中的多功能性。例如,我们展示了一种夹爪,它可以根据物体大小来调节自身的骨架大小。这样一来,大的夹爪就可以夹住小的形状,而小的夹爪也可以夹住大的形状
自感知的形态变化夹爪能够自适应不同的抓取任务,四足机器人可以根据地面情况调整身体形态。例如,可以使用爬行的方式通过一个小的缝隙,然后改变身体形状,站起来,从而能够走得更快。当需要通过一个较小的桥时,可以抱着桥爬过去

机器人可以在需要时改变肢体形状以适应不同的环境和任务。比如说一个机器人的腿从直的变成弯曲的,就可以爬上岸移动,
当脚从弯曲变为直的时候,就可以重新回到水中游泳

重写内容为:无限的潜力
在这项研究中,最引人注目的成果之一是建立了一组嵌入式变形模块库,这些库可以实现可编程的形状变化,包括扭曲、三维弯曲和表面变形。这个库展示了嵌入式方法使机器人能够应对各种挑战
这项突破性研究的影响将是深远的。嵌入式形态变化不仅增强了机器人与周围环境的互动能力,还为搜索救援、探索、医疗保健和工业自动化等领域的应用带来了新的可能性。机器人能够无缝切换不同形态和功能,这为机器人领域带来了前所未有的多功能性
请点击以下链接查看论文:
需要重写的内容是:https://www.nature.com/articles/s41467-023-41708-6
以上是Nat. Commun.: 机器人模仿蝌蚪进化获得新技能!的详细内容。更多信息请关注PHP中文网其他相关文章!





















