

机器学习|PyTorch简明教程下篇

接着上篇《PyTorch简明教程上篇》,继续学习多层感知机,卷积神经网络和LSTMNet。
1、多层感知机
多层感知机是一种简单的神经网络,也是深度学习的重要基础。它通过在网络中添加一个或多个隐藏层来克服线性模型的限制。具体的图示如下:
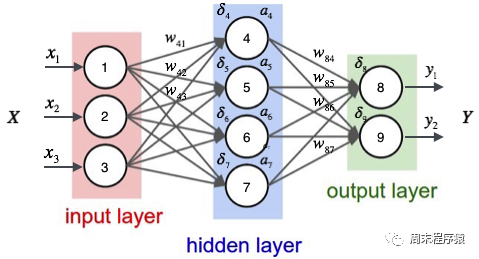
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上代码和单层神经网络的代码类似,区别是build_model构建一个包含三个线性层和两个ReLU激活函数的神经网络模型:
- 向模型中添加第一个线性层,该层的输入特征数量为input_dim,输出特征数量为512;
- 接着添加一个ReLU激活函数和一个Dropout层,用于增强模型的非线性能力和防止过拟合;
- 向模型中添加第二个线性层,该层的输入特征数量为512,输出特征数量为512;
- 接着添加一个ReLU激活函数和一个Dropout层;
- 向模型中添加第三个线性层,该层的输入特征数量为512,输出特征数量为output_dim,即模型的输出类别数量;
(2)什么是ReLU激活函数?ReLU(Rectified Linear Unit,修正线性单元)激活函数是深度学习和神经网络中常用的一种激活函数,ReLU函数的数学表达式为:f(x) = max(0, x),其中x是输入值。ReLU函数的特点是当输入值小于等于0时,输出为0;当输入值大于0时,输出等于输入值。简单来说,ReLU函数就是将负数部分抑制为0,正数部分保持不变。ReLU激活函数在神经网络中的作用是引入非线性因素,使得神经网络能够拟合复杂的非线性关系,同时,ReLU函数相对于其他激活函数(如Sigmoid或Tanh)具有计算速度快、收敛速度快等优点;
(3)什么是Dropout层?Dropout层是一种在神经网络中用于防止过拟合的技术。在训练过程中,Dropout层会随机地将一部分神经元的输出置为0,即"丢弃"这些神经元,这样做的目的是为了减少神经元之间的相互依赖,从而提高网络的泛化能力;
(4)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
可以看出最后相同的数据分类,准确率比单层神经网络要高(98.59% > 97.68%)。
2、卷积神经网络
卷积神经网络(CNN)是一种深度学习算法。当输入一个矩阵时,CNN可以对其中的重要和不重要部分进行区分(分配权重)。相较于其他分类任务,CNN对数据预处理的要求并不高,只要经过充分的训练,就能够学习到矩阵的特征。下图展示了该过程:
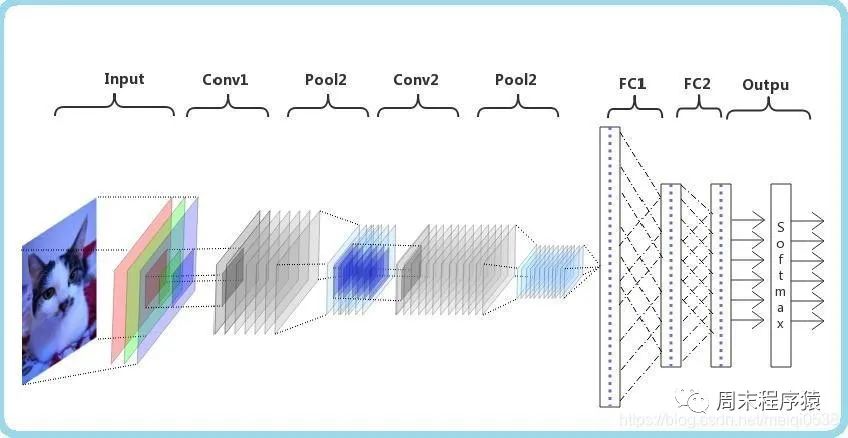
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上代码定义了一个名为ConvNet的类,它继承自torch.nn.Module类,表示一个卷积神经网络,在__init__方法中定义了两个子模块conv和fc,分别表示卷积层和全连接层。在conv子模块中,我们定义了两个卷积层(torch.nn.Conv2d)、两个最大池化层(torch.nn.MaxPool2d)、两个ReLU激活函数(torch.nn.ReLU)和一个Dropout层(torch.nn.Dropout)。在fc子模块中,定义了两个线性层(torch.nn.Linear)、一个ReLU激活函数和一个Dropout层;
池化层在CNN中扮演着重要的角色,其主要目的有以下几点:
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teY以上是机器学习|PyTorch简明教程下篇的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 15个值得推荐的开源免费图像标注工具
Mar 28, 2024 pm 01:21 PM
15个值得推荐的开源免费图像标注工具
Mar 28, 2024 pm 01:21 PM
图像标注是将标签或描述性信息与图像相关联的过程,以赋予图像内容更深层次的含义和解释。这一过程对于机器学习至关重要,它有助于训练视觉模型以更准确地识别图像中的各个元素。通过为图像添加标注,使得计算机能够理解图像背后的语义和上下文,从而提高对图像内容的理解和分析能力。图像标注的应用范围广泛,涵盖了许多领域,如计算机视觉、自然语言处理和图视觉模型具有广泛的应用领域,例如,辅助车辆识别道路上的障碍物,帮助疾病的检测和诊断通过医学图像识别。本文主要推荐一些较好的开源免费的图像标注工具。1.Makesens
 一文带您了解SHAP:机器学习的模型解释
Jun 01, 2024 am 10:58 AM
一文带您了解SHAP:机器学习的模型解释
Jun 01, 2024 am 10:58 AM
在机器学习和数据科学领域,模型的可解释性一直是研究者和实践者关注的焦点。随着深度学习和集成方法等复杂模型的广泛应用,理解模型的决策过程变得尤为重要。可解释人工智能(ExplainableAI|XAI)通过提高模型的透明度,帮助建立对机器学习模型的信任和信心。提高模型的透明度可以通过多种复杂模型的广泛应用等方法来实现,以及用于解释模型的决策过程。这些方法包括特征重要性分析、模型预测区间估计、局部可解释性算法等。特征重要性分析可以通过评估模型对输入特征的影响程度来解释模型的决策过程。模型预测区间估计
 通透!机器学习各大模型原理的深度剖析!
Apr 12, 2024 pm 05:55 PM
通透!机器学习各大模型原理的深度剖析!
Apr 12, 2024 pm 05:55 PM
通俗来说,机器学习模型是一种数学函数,它能够将输入数据映射到预测输出。更具体地说,机器学习模型就是一种通过学习训练数据,来调整模型参数,以最小化预测输出与真实标签之间的误差的数学函数。在机器学习中存在多种模型,例如逻辑回归模型、决策树模型、支持向量机模型等,每一种模型都有其适用的数据类型和问题类型。同时,不同模型之间存在着许多共性,或者说有一条隐藏的模型演化的路径。将联结主义的感知机为例,通过增加感知机的隐藏层数量,我们可以将其转化为深度神经网络。而对感知机加入核函数的话就可以转化为SVM。这一
 通过学习曲线识别过拟合和欠拟合
Apr 29, 2024 pm 06:50 PM
通过学习曲线识别过拟合和欠拟合
Apr 29, 2024 pm 06:50 PM
本文将介绍如何通过学习曲线来有效识别机器学习模型中的过拟合和欠拟合。欠拟合和过拟合1、过拟合如果一个模型对数据进行了过度训练,以至于它从中学习了噪声,那么这个模型就被称为过拟合。过拟合模型非常完美地学习了每一个例子,所以它会错误地分类一个看不见的/新的例子。对于一个过拟合的模型,我们会得到一个完美/接近完美的训练集分数和一个糟糕的验证集/测试分数。略有修改:"过拟合的原因:用一个复杂的模型来解决一个简单的问题,从数据中提取噪声。因为小数据集作为训练集可能无法代表所有数据的正确表示。"2、欠拟合如
 人工智能在太空探索和人居工程中的演变
Apr 29, 2024 pm 03:25 PM
人工智能在太空探索和人居工程中的演变
Apr 29, 2024 pm 03:25 PM
20世纪50年代,人工智能(AI)诞生。当时研究人员发现机器可以执行类似人类的任务,例如思考。后来,在20世纪60年代,美国国防部资助了人工智能,并建立了实验室进行进一步开发。研究人员发现人工智能在许多领域都有用武之地,例如太空探索和极端环境中的生存。太空探索是对宇宙的研究,宇宙涵盖了地球以外的整个宇宙空间。太空被归类为极端环境,因为它的条件与地球不同。要在太空中生存,必须考虑许多因素,并采取预防措施。科学家和研究人员认为,探索太空并了解一切事物的现状有助于理解宇宙的运作方式,并为潜在的环境危机
 使用C++实现机器学习算法:常见挑战及解决方案
Jun 03, 2024 pm 01:25 PM
使用C++实现机器学习算法:常见挑战及解决方案
Jun 03, 2024 pm 01:25 PM
C++中机器学习算法面临的常见挑战包括内存管理、多线程、性能优化和可维护性。解决方案包括使用智能指针、现代线程库、SIMD指令和第三方库,并遵循代码风格指南和使用自动化工具。实践案例展示了如何利用Eigen库实现线性回归算法,有效地管理内存和使用高性能矩阵操作。
 可解释性人工智能:解释复杂的AI/ML模型
Jun 03, 2024 pm 10:08 PM
可解释性人工智能:解释复杂的AI/ML模型
Jun 03, 2024 pm 10:08 PM
译者|李睿审校|重楼人工智能(AI)和机器学习(ML)模型如今变得越来越复杂,这些模型产生的输出是黑盒——无法向利益相关方解释。可解释性人工智能(XAI)致力于通过让利益相关方理解这些模型的工作方式来解决这一问题,确保他们理解这些模型实际上是如何做出决策的,并确保人工智能系统中的透明度、信任度和问责制来解决这个问题。本文探讨了各种可解释性人工智能(XAI)技术,以阐明它们的基本原理。可解释性人工智能至关重要的几个原因信任度和透明度:为了让人工智能系统被广泛接受和信任,用户需要了解决策是如何做出的
 你所不知道的机器学习五大学派
Jun 05, 2024 pm 08:51 PM
你所不知道的机器学习五大学派
Jun 05, 2024 pm 08:51 PM
机器学习是人工智能的重要分支,它赋予计算机从数据中学习的能力,并能够在无需明确编程的情况下改进自身能力。机器学习在各个领域都有着广泛的应用,从图像识别和自然语言处理到推荐系统和欺诈检测,它正在改变我们的生活方式。机器学习领域存在着多种不同的方法和理论,其中最具影响力的五种方法被称为“机器学习五大派”。这五大派分别为符号派、联结派、进化派、贝叶斯派和类推学派。1.符号学派符号学(Symbolism),又称为符号主义,强调利用符号进行逻辑推理和表达知识。该学派认为学习是一种逆向演绎的过程,通过已有的
