

华人团队斩获最佳论文、最佳系统论文奖项,CoRL研究成果获奖公布

自2017年首次举办以来,CoRL已经成为了机器人学与机器学习交叉领域的全球顶级学术会议之一。CoRL是面向机器人学习研究的单一主题会议,涵盖了机器人学、机器学习和控制等多个主题,包括理论与应用
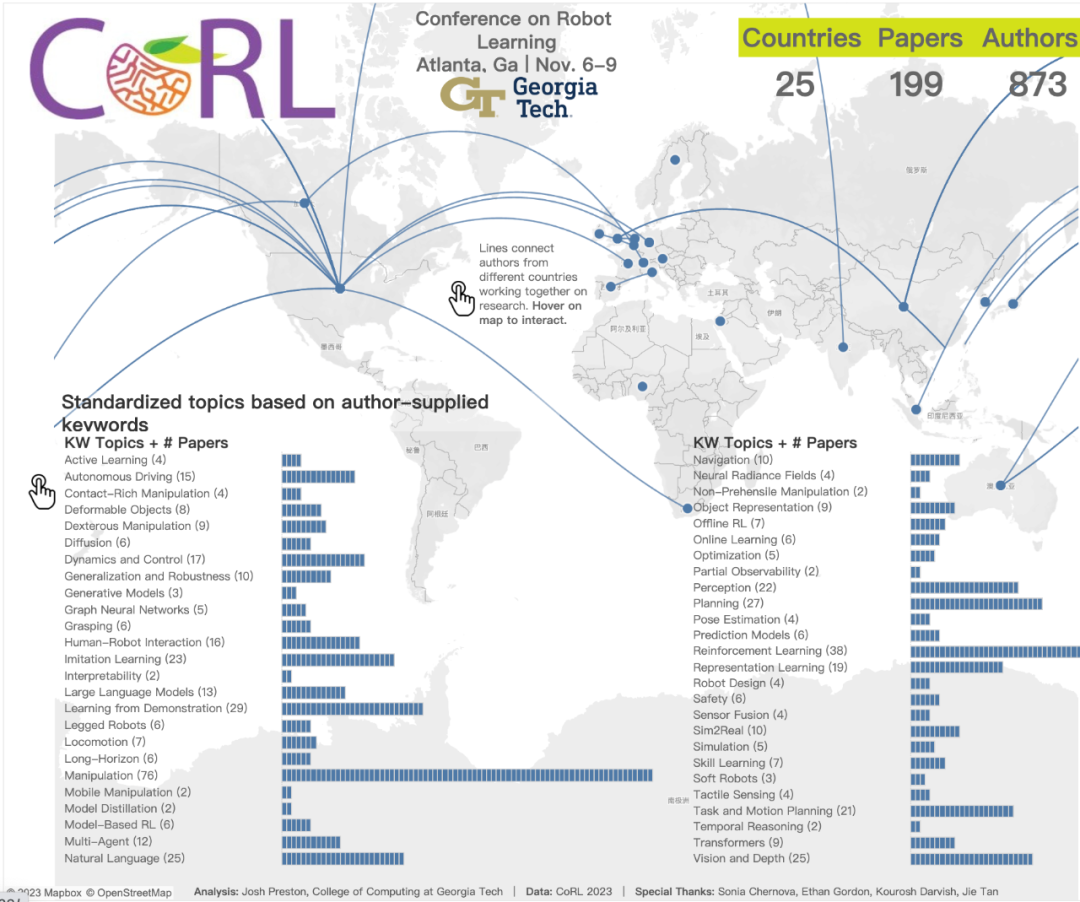
2023年的CoRL大会将于11月6日至9日在美国亚特兰大举行。根据官方数据透露,今年有来自25个国家的199篇论文入选CoRL。热门主题包括操作、强化学习等。虽然相较于AAAI、CVPR等大型AI学术会议,CoRL的规模较小,但随着今年大模型、具身智能、人形机器人等概念的热度上升,值得关注的相关研究也会在CoRL会议上呈现
目前,CoRL 2023 官方已公布最佳论文奖、最佳学生论文奖、最佳系统论文奖等奖项。接下来,我们将为大家介绍一下这些获奖论文。
最佳论文
- 论文:Distilled Feature Fields Enable Few-Shot Language-Guided Manipulation
- 作者:William Shen, Ge Yang, Alan Yu, Jensen Wong, Leslie Pack Kaelbling, Phillip Isola
- 机构:MIT CSAIL、IAIFI
- 论文地址:https://openreview.net/forum?id=Rb0nGIt_kh5
研究概述:目前,图像模型中的自监督学习和语言监督学习已经融入了丰富的全球知识,这对于模型的泛化能力非常关键。然而,图像特征只包含了二维信息。我们了解到,在机器人任务中,对于真实世界中三维物体的几何形状有所了解是非常重要的
通过使用蒸馏特征场(Distilled Feature Field,DFF),该研究将精确的三维几何图形与来自二维基础模型的丰富语义结合起来,以使机器人能够利用二维基础模型中丰富的视觉和语言先验,从而完成基于语言指导的操作
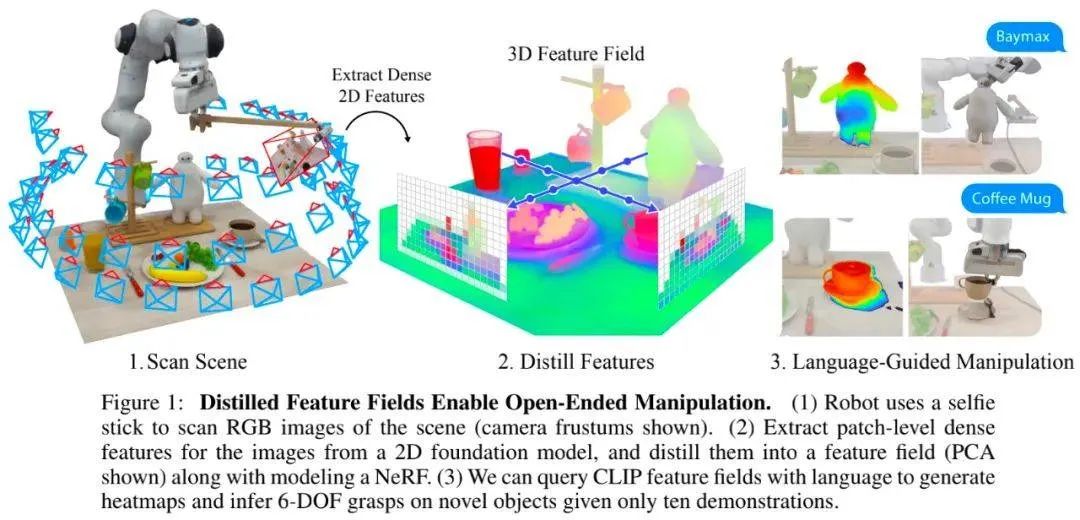
具体来说,该研究提出了一种用于 6-DOF 抓取和放置的小样本学习方法,并利用强大的空间和语义先验泛化到未见过物体上。使用从视觉 - 语言模型 CLIP 中提取的特征,该研究提出了一种通过开放性的自然语言指令对新物体进行操作,并展示了这种方法泛化到未见过的表达和新型物体的能力。
这篇论文的两位共同一作是 CSAIL 「具身智能」团队的成员 William Shen 和杨歌,其中杨歌是 2023 年 CSAIL 具身智能研讨会的共同筹办人。
我了解到《机器之心》曾经详细介绍过这项研究,请查阅《大模型加持的机器人有多强,MIT CSAIL&IAIFI 用自然语言指导机器人抓取物体》
最佳学生论文
- 论文:Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
- 作者:Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
- 机构:普林斯顿大学、Google DeepMind
- 论文地址:https://openreview.net/forum?id=4ZK8ODNyFXx
大型语言模型(LLM)是一种具有广泛应用前景的技术,在机器人领域尤其如此。然而,尽管LLM在逐步规划和常识推理方面表现出了巨大的潜力,但它也存在一些幻觉问题
基于此,该研究提出了一种新框架 ——KnowNo,用于度量和对齐基于 LLM 的规划器的不确定性。它能够使 LLM 意识到哪些信息是未知的,并在有需要时求助。
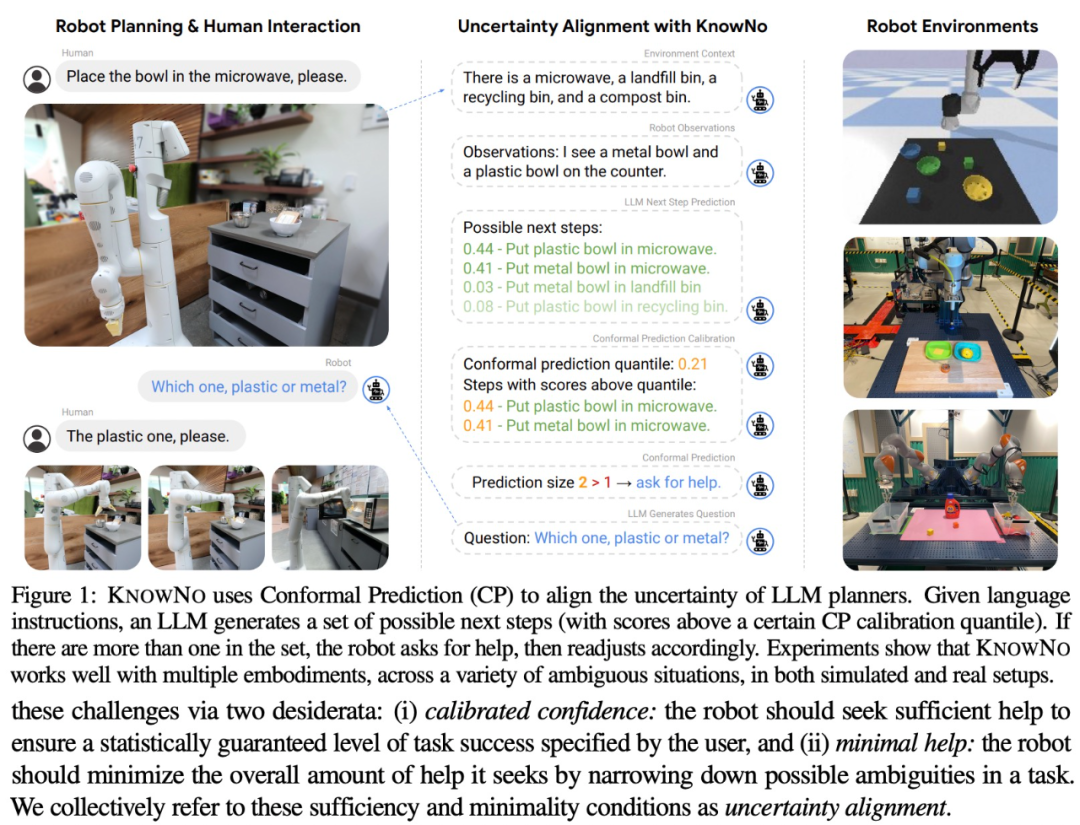
KnowNo是基于共形预测理论的,它提供了任务完成的统计保证,并能够最大程度地减少多步骤规划任务中的人工干预
该研究在各种模拟和真实机器人实验中,用各种模式的不确定任务(包括空间不确定性、数字不确定性等等)对 KnowNo 进行了测试。实验结果表明, KnowNo 在提高效率和自主性方面表现出色,优于基线,并且安全可信。KnowNo 能够在不进行模型微调的情况下直接用于 LLM,为模型的不确定性提供了一种有效的轻量级解决方法,并能够与基础模型不断增强的能力相辅相成。
最佳系统论文
- 论文:RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools
- 作者:Haochen Shi, Huazhe Xu, Samuel Clarke, Yunzhu Li, Jiajun Wu
- 机构:斯坦福大学、UIUC
- 论文地址:https://openreview.net/forum?id=69y5fzvaAT
论文简介:人类擅长制造和使用各种工具,但对于机器人而言,理解如何有效使用工具,并在相应的物体上完成操作仍然是一个很大的挑战。该研究构建了一个名为RoboCook的智能机器人系统,该系统能够通过各种工具感知、建模并操纵弹塑性物体(elasto-plastic object)
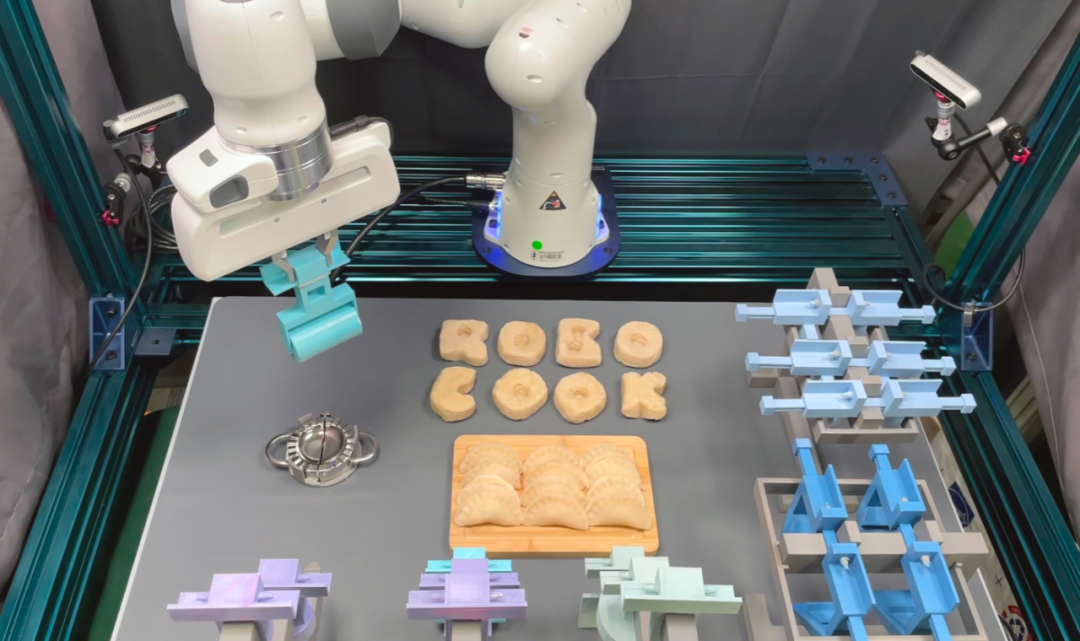
RoboCook 使用点云场景表征,利用图神经网络(GNN)对工具与物体的相互作用进行建模,并将工具分类与自监督策略学习相结合,以制定操作计划。
该研究表明,对于每个工具,仅需 20 分钟的现实世界交互数据,RoboCook 就能学会并操纵机械臂完成一些复杂的、长时程的弹塑性物体操作任务,例如制作饺子、字母饼干等。
据实验结果显示,RoboCook 的性能明显优于现有的 SOTA 方法,且在面对严重的外部干扰时仍能表现出稳定性,对不同材料的适应能力也更为出色
值得一提的是,这篇论文的共同一作分别是来自斯坦福大学的博士生 Haochen Shi、原斯坦福大学博士后研究员、现清华大学交叉信息科学研究所助理教授 Huazhe Xu,论文作者之一是姚班校友、斯坦福大学助理教授吴佳俊。
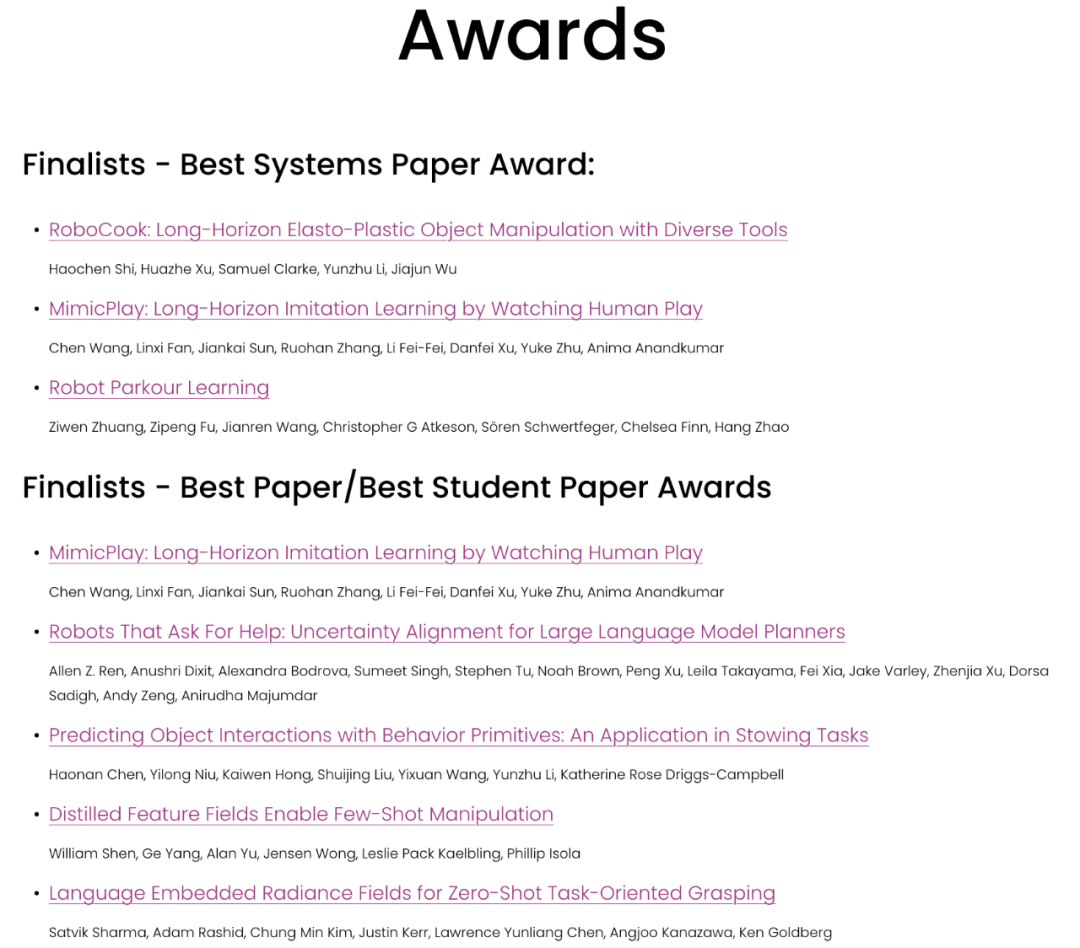
获奖论文入围名单已经公布
以上是华人团队斩获最佳论文、最佳系统论文奖项,CoRL研究成果获奖公布的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 phpmyadmin建立数据表
Apr 10, 2025 pm 11:00 PM
phpmyadmin建立数据表
Apr 10, 2025 pm 11:00 PM
要使用 phpMyAdmin 创建数据表,以下步骤必不可少:连接到数据库并单击“新建”标签。为表命名并选择存储引擎(推荐 InnoDB)。通过单击“添加列”按钮添加列详细信息,包括列名、数据类型、是否允许空值以及其他属性。选择一个或多个列作为主键。单击“保存”按钮创建表和列。
 怎么创建oracle数据库 oracle怎么创建数据库
Apr 11, 2025 pm 02:33 PM
怎么创建oracle数据库 oracle怎么创建数据库
Apr 11, 2025 pm 02:33 PM
创建Oracle数据库并非易事,需理解底层机制。1. 需了解数据库和Oracle DBMS的概念;2. 掌握SID、CDB(容器数据库)、PDB(可插拔数据库)等核心概念;3. 使用SQL*Plus创建CDB,再创建PDB,需指定大小、数据文件数、路径等参数;4. 高级应用需调整字符集、内存等参数,并进行性能调优;5. 需注意磁盘空间、权限和参数设置,并持续监控和优化数据库性能。 熟练掌握需不断实践,才能真正理解Oracle数据库的创建和管理。
 oracle数据库怎么创建 oracle数据库怎么建库
Apr 11, 2025 pm 02:36 PM
oracle数据库怎么创建 oracle数据库怎么建库
Apr 11, 2025 pm 02:36 PM
创建Oracle数据库,常用方法是使用dbca图形化工具,步骤如下:1. 使用dbca工具,设置dbName指定数据库名;2. 设置sysPassword和systemPassword为强密码;3. 设置characterSet和nationalCharacterSet为AL32UTF8;4. 设置memorySize和tablespaceSize根据实际需求调整;5. 指定logFile路径。 高级方法为使用SQL命令手动创建,但更复杂易错。 需要注意密码强度、字符集选择、表空间大小及内存
 oracle数据库的语句怎么写
Apr 11, 2025 pm 02:42 PM
oracle数据库的语句怎么写
Apr 11, 2025 pm 02:42 PM
Oracle SQL语句的核心是SELECT、INSERT、UPDATE和DELETE,以及各种子句的灵活运用。理解语句背后的执行机制至关重要,如索引优化。高级用法包括子查询、连接查询、分析函数和PL/SQL。常见错误包括语法错误、性能问题和数据一致性问题。性能优化最佳实践涉及使用适当的索引、避免使用SELECT *、优化WHERE子句和使用绑定变量。掌握Oracle SQL需要实践,包括代码编写、调试、思考和理解底层机制。
 MySQL数据表字段操作指南之添加、修改与删除方法
Apr 11, 2025 pm 05:42 PM
MySQL数据表字段操作指南之添加、修改与删除方法
Apr 11, 2025 pm 05:42 PM
MySQL 中字段操作指南:添加、修改和删除字段。添加字段:ALTER TABLE table_name ADD column_name data_type [NOT NULL] [DEFAULT default_value] [PRIMARY KEY] [AUTO_INCREMENT]修改字段:ALTER TABLE table_name MODIFY column_name data_type [NOT NULL] [DEFAULT default_value] [PRIMARY KEY]
 MySQL数据库中的嵌套查询实例详解
Apr 11, 2025 pm 05:48 PM
MySQL数据库中的嵌套查询实例详解
Apr 11, 2025 pm 05:48 PM
嵌套查询是一种在一个查询中包含另一个查询的方式,主要用于检索满足复杂条件、关联多张表以及计算汇总值或统计信息的数据。实例示例包括:查找高于平均工资的雇员、查找特定类别的订单以及计算每种产品的总订购量。编写嵌套查询时,需要遵循:编写子查询、将其结果写入外层查询(使用别名或 AS 子句引用)、优化查询性能(使用索引)。
 oracle数据库表的完整性约束有哪些
Apr 11, 2025 pm 03:42 PM
oracle数据库表的完整性约束有哪些
Apr 11, 2025 pm 03:42 PM
Oracle 数据库的完整性约束可确保数据准确性,包括:NOT NULL:禁止空值;UNIQUE:保证唯一性,允许单个 NULL 值;PRIMARY KEY:主键约束,加强 UNIQUE,禁止 NULL 值;FOREIGN KEY:维护表间关系,外键引用主表主键;CHECK:根据条件限制列值。
 oracle是干嘛的
Apr 11, 2025 pm 06:06 PM
oracle是干嘛的
Apr 11, 2025 pm 06:06 PM
Oracle 是全球最大的数据库管理系统(DBMS)软件公司,其主要产品包括以下功能:关系数据库管理系统(Oracle 数据库)开发工具(Oracle APEX、Oracle Visual Builder)中间件(Oracle WebLogic Server、Oracle SOA Suite)云服务(Oracle Cloud Infrastructure)分析和商业智能(Oracle Analytics Cloud、Oracle Essbase)区块链(Oracle Blockchain Pla
