

综述北理工团队探索的生物混合机器人供电方案的完整梳理

给小强加上个外挂,变身超级小强,还可以用手机遥控:

或者将芯片植入Jerry的身体,这样汤姆猫就无法再欺负他了

当动物们纷纷秀出它们的完全体,这就是一类新物种——生物混合机器人!
这些生物混合机器人因为装上了各种电子设备,所以人们可以控制这些动物,让它们去一些危险的地方执行任务。比起仿生机器人,生物混合机器人利用动物的身体,运动起来更加灵活,而且可以在更复杂的环境里活动。
不过这也不是说它们就不需要电源了。其实动物身上的设备通常是靠电刺激神经末梢或者肌肉,来控制它们的行动的,这需要用电。而且植入的芯片之类的其它设备也要耗电,所以怎样给它们提供持久的电能供应仍然是一个问题。
目前来看,这些生物混合机器人使用的电池通常有这几类:
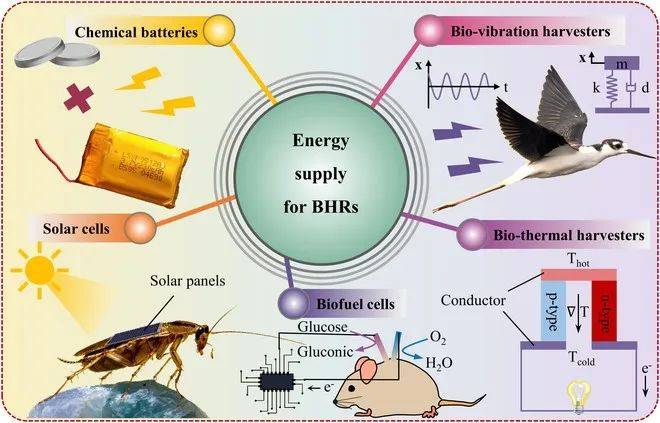
常见的电池有化学电池(如纽扣电池)、太阳能电池、生物燃料电池(利用生物体内的化学能)、生物热能采集设备(收集和利用生物体的体热)和生物振动能量采集设备(通过动物的运动来充电)
最近来自北理工的王文中、赵杰亮教授领导的团队在中国科技期刊卓越行动计划高起点新刊《Cyborg and Bionic Systems》上以A Review of Energy Supply for Biomachine Hybrid Robots为题发表了综述文章,梳理了这几种常见的生物混合机器人的供电方式。
原文链接:
https://spj.science.org/doi/10.34133/cbsystems.0053(点击文章最下方左下角“阅读原文”进入链接)
▍化学电池
化学电池是很成熟的技术,所以也是为生物混合机器人供电的首选。化学电池经常被用来给昆虫机器人供电。
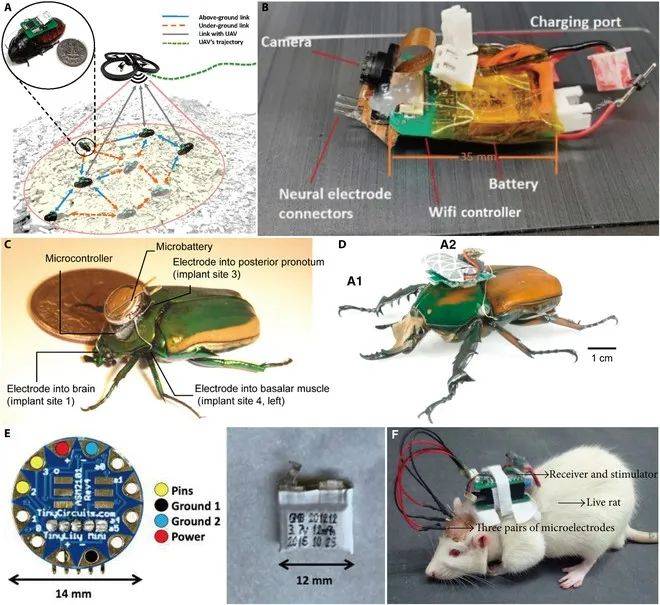
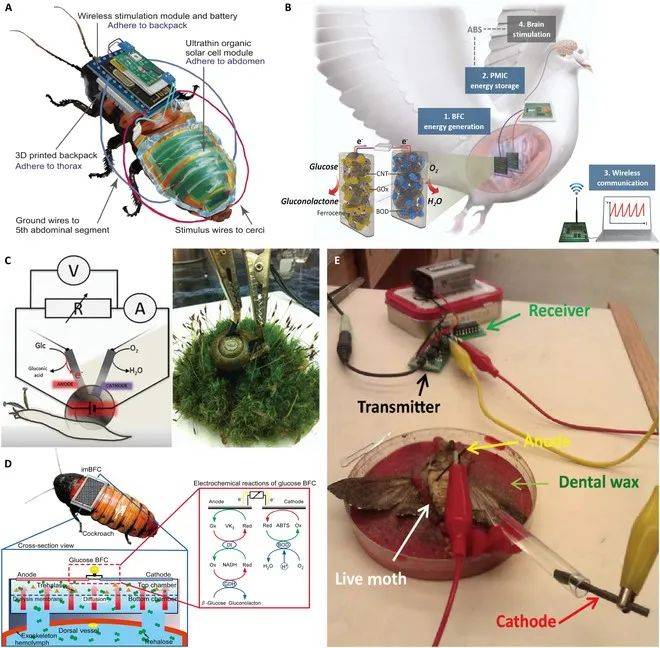
比如说马达加斯加蟑螂这个昆虫中的大块头,就常被抓来当“苦力”。科学家给蟑螂背上控制背包,用锂离子电池来驱动这个蟑螂-机器混合机器人。是不是觉得像给蟑螂穿上了一件高科技马甲?
更有甚者还使用纽扣电池为机器蟑螂身上的低功耗蓝牙无线收发器等小零件提供电力。这些小零件在实验中经过严格测试,每个都可以连续工作12小时。
锂聚合物电池成了大明星,因为它的能量密度高,而且非常轻便。想象一下,让蟑螂背着锂聚合物电池,变身超级昆虫,成为灾难救援的英雄。
另外,还有团队用一枚7.4V、125毫安时的锂聚合物电池给名为CameraRoach的蟑螂机器人提供动力。这家伙身上的摄像头就像千里眼,可以随时向远程控制员报告位置,而且还能通过升压转换器获得更多的能量供应。还有人发明了一种用纽扣电池驱动的微控制背包,专门用来控制蝗虫的跳跃,在10多分钟里能让蝗虫跳得超过20次!
对于飞虫来说,背上的设备越轻越好。科学家们为飞蛾机器人找到了两个超级轻的8mAh硬币电池,总重只有120mg。随后他们换成了一个3.6V、8.5mAh的锂聚合物电池,重量只有300mg。这样轻的电池可以让飞蛾机器人更快乐地飞行,连续工作超过5小时
除了昆虫机器人外,他们连海洋生物都不放过。有一个团队还开发了一种用10mAh锂聚合物电池来驱动水母机器人。这个微电子控制器就像一个便携式、自给自足的小型设备,可以随时让水母动起来。
相比之下,像老鼠、鱼或者鸽子这些脊椎动物对电池重量就没有这么挑剔了,所以科学家们这时候更关注电池的综合性能。这里最常用的是锂聚合物电池,比如有一种老鼠机器人就用的是两个120mAh的锂聚合物电池来为老鼠携带的微型相机和电子元件提供电力,让老鼠能够顺利逃出迷宫。还有一种鸽子导航控制系统,该系统由一个3.7V、120mAh的锂聚合物电池提供动力。
太阳能电池是一种利用太阳能转化为电能的装置。它通过将太阳光转化为电流,实现了可持续的能源利用。太阳能电池通常由多个光电池片组成,这些片子能够吸收太阳光并产生电子流。这些电子流经过导线传输,最终转化为可用的电力。太阳能电池可以广泛应用于家庭、工业和农业等领域,为人们提供清洁、可再生的能源来源。随着技术的发展,太阳能电池的效率和成本也在不断改善,使得太阳能发电成为一种可行且可持续的能源选择
目前有人使用25mm²大小、质量为63mg的太阳能芯片给飞蛾机器人供电,工作原理和电池很像,它的电压是4V。在自然光下,太阳能电池可以产生近200μW的稳定输出,但在人工照明条件或阴影下,输出功率可能只有4μW。
不过昆虫们可不会乖乖待在太阳底下给电池充电,所以研究人员给蟑螂设置了一个虚拟围栏来“画地为牢”,让它老实地待在光源附近的一个区域,直到充满电为止。实验研究表明,20mA的电池可以在直射和散射阳光下、聚焦白光LED或距离8cm的电灯下,2小时内完全充电。
太阳能电池在受到环境影响时表现不佳。对于那些喜欢藏在阴暗地方的昆虫机器人来说,太阳能电池的使用受到更多限制
生物燃料电池是一种利用生物质材料作为燃料并转化为电能的设备。它利用生物质资源,如农作物残渣、废弃物和植物油等,经过化学反应产生电能。生物燃料电池具有可再生性、低排放和高效能的特点,被广泛应用于能源领域。它被认为是一种环保和可持续发展的能源解决方案,有望在未来取代传统燃料电池
接下来要说的几种供电方法都属于是“羊毛出在羊身上”,也就是通过动物本身来提供能量。比如生物燃料电池就是把生物体中的化学能转化成电能。
生物燃料电池分成微生物燃料电池和酶燃料电池两种,酶生物燃料电池(EBFC)使用酶作为催化剂,在体内氧化葡萄糖,被认为是最适合用来植入生物体内的电池。不过这种电池更适合大一些的动物,比如老鼠、兔子、鸽子等,而不适合用在昆虫身上。利用鸽子体内的葡萄糖和氧气,生物燃料电池的功率在体外为0.12 mW,在体内为0.08 mW。通过使用功率管理集成电路,可以在10分钟内以28.4 mJ的速度收集足够的能量。
和普通化学电池相比,生物燃料电池的好处是它所需的化学反应物来自动物的体液,所以可以不停地补充,让电池不停地工作,理论上可以无限期运行。但实际上这种电池的使用寿命很短,而且能量密度比较低,因此许多研究人员寄希望于使用纳米材料来做燃料电池。
▍生物热能采集设备
动物的体热也可以用来给电子设备供电。不过目前这主要是用在人体上。为了制造出可以自己供电的可穿戴电子设备,科学家们研究了很多种热电转换装置,这些装置可以把我们身体的热量转化为电能。
考虑到可穿戴设备的便携性,科学家们在很多方面进行了研究,比如怎样利用温度差异进行发电,怎样优化热电转换装置的冷侧和热侧,怎样让材料和设备更灵活,以及怎样把从二维到三维的各种特性优化好。
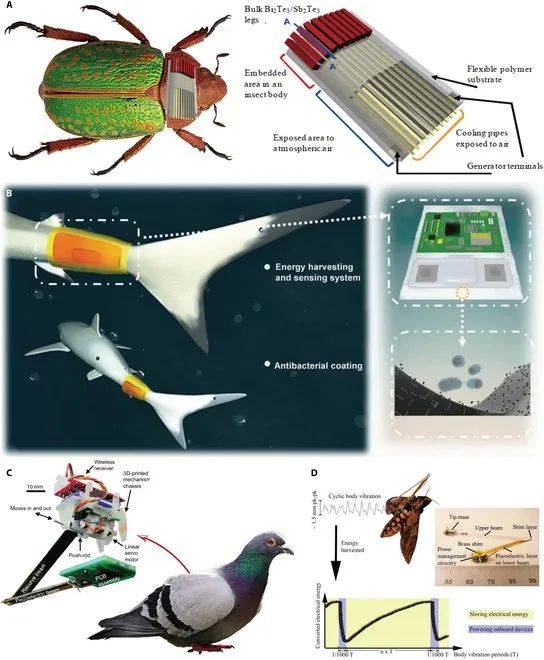
而对于动物,有人就在羊脖子上装了一种热电能量采集器,它的最大平均输出功率可以达到173微瓦。还有科学家设计了一种可以植入甲壳虫体内的微形热电能量采集器。这个采集器的热电偶材料是Bi2Te3/Sb2Te3,在甲壳虫的幼虫阶段可以放在它的背上。这个采集器的冷端暴露在空气中,这样就可以产生温差,热电偶和冷端都附着在一个柔性的聚合物基板上。这个采集器在11°C的温差下可以实现每平方厘米10微瓦的输出功率密度。
总体来说,生物热能采集器效率很高,也很环保,但是它的工作原理有一些限制,只有存在足够的温差才能产生更多的电能。因此,这种采集器的功率密度比较低,很难满足更高的供电需求。
近年来,研究人员在很多方面进行了研究,比如设计并合成了一些新的材料,还设计了一些微纳结构来提高采集器的效率。这些研究的目的是为了制造出更高效、更高功率密度的生物热电能量采集器。
生物振动能量采集器是一种设备,可以从生物体的振动中获取能量
动物在运动时会产生振动,也可以用来供电。振动-电转换机制中被研究得最多的是基于压电、电磁和静电转换。振动采集器被用在鱼类、鸽子、野鸡和长颈鹿身上,甚至有人开发了一种覆盖有抗菌涂层的空气囊摩擦纳米发电机,为鱼类机器人提供动力。纳米发电机在鱼尾每次摆动时产生0.74毫瓦的峰值功率,其电压实时反映鱼尾的行为。
生物振动能量采集器目前还有一些问题,例如能量转换效率低、功率密度小、频率带宽窄以及小型化和集成不足。为了改进这些问题,研究人员正在从各个方面进行研究,例如复合材料技术、混合能量转换机制、多稳态结构以及频率上转换结构。
总之,生物混合机器人的能源系统受到了很多研究人员的关注,因为这决定着生物混合机器人未来能否顺利发展。目前使用的能源主要是化学电池,这些化学电池能稳定地提供电力。但化学电池也有一些问题,比如重量大、体积大和能量密度不够高等。不过更重要的是怎么让生物混合机器人的供能更持久,避免因为更换电池或充电而影响机器人的正常运行。
为了解决这个问题,研究人员正在研究自供能装置,它可以利用太阳能、生物能量、生物热能和生物振动能量等。目前研究的自供能装置还存在一些问题,比如转换效率低、输出功率小、能源供应不稳定以及与生物载体的兼容性不好等。未来,研究人员需要解决这些问题,开发出更高效、更持久、更轻便的能源供应装置,让生物混合机器人能够更好地为人类服务。
以上是综述北理工团队探索的生物混合机器人供电方案的完整梳理的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
Vibe编码通过让我们使用自然语言而不是无尽的代码行创建应用程序来重塑软件开发的世界。受Andrej Karpathy等有远见的人的启发,这种创新的方法使Dev
 2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月,Generative AI又是一个改变游戏规则的月份,为我们带来了一些最令人期待的模型升级和开创性的新功能。从Xai的Grok 3和Anthropic的Claude 3.7十四行诗到Openai的G
 如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
Yolo(您只看一次)一直是领先的实时对象检测框架,每次迭代都在以前的版本上改善。最新版本Yolo V12引入了进步,可显着提高准确性
 Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4当前可用并广泛使用,与诸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和产生连贯的响应方面取得了重大改进。未来的发展可能包括更多个性化的间
 Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google DeepMind的Gencast:天气预报的革命性AI 天气预报经历了巨大的转变,从基本观察到复杂的AI驱动预测。 Google DeepMind的Gencast,开创性
 哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
本文讨论了AI模型超过Chatgpt,例如Lamda,Llama和Grok,突出了它们在准确性,理解和行业影响方面的优势。(159个字符)
 O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
Openai的O1:为期12天的礼物狂欢始于他们迄今为止最强大的模型 12月的到来带来了全球放缓,世界某些地区的雪花放缓,但Openai才刚刚开始。 山姆·奥特曼(Sam Altman)和他的团队正在推出12天的礼物前
 如何将Mistral OCR用于下一个抹布模型
Mar 21, 2025 am 11:11 AM
如何将Mistral OCR用于下一个抹布模型
Mar 21, 2025 am 11:11 AM
MISTRAL OCR:通过多模式文档理解彻底改变检索效果 检索增强的生成(RAG)系统具有明显高级的AI功能,从而可以访问大量的数据存储,以获得更明智的响应
