
进入多模态时代,大模型也会操纵无人机了!
当视觉模块捕捉到启动条件时,大模型这个“大脑”会生成动作指令,然后无人机可以迅速准确地执行
周尧明教授领导的北京航空航天大学智能无人机团队的研究人员,提出了一种基于多模态大模型的具身智能体架构
目前,这种结构已经用于控制无人机
这种新的智能体表现如何,又有哪些技术细节呢?
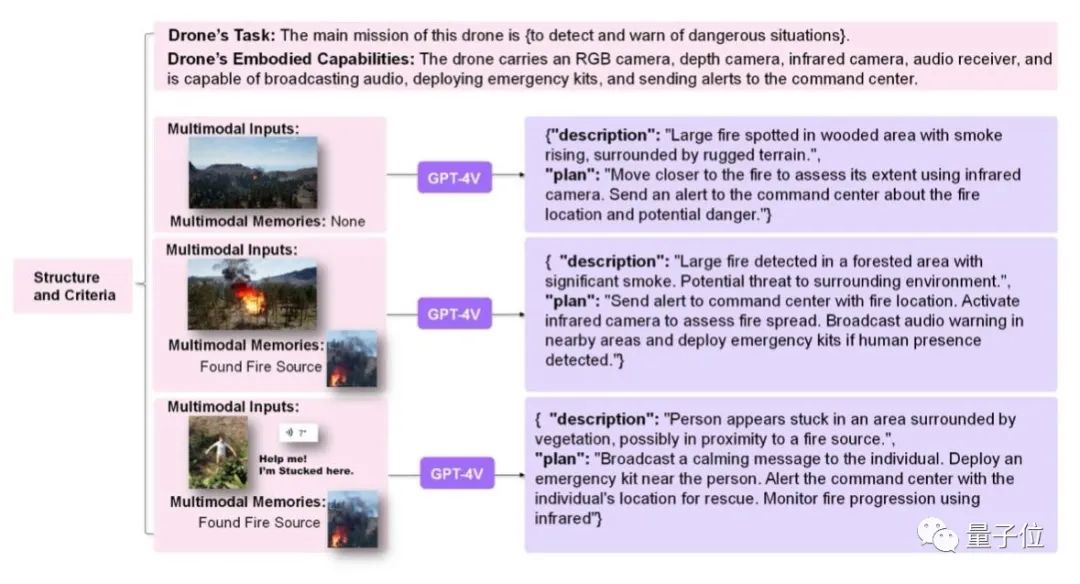
研究团队利用大模型对多模态数据进行理解,将真实物理世界的照片、声音、传感器数据等多源信息融合,以使智能体能够感知周围环境,并作出相应的行为操作
同时,团队提出了一套“Agent as Cerebrum,Controller as Cerebellum”(智能体即大脑,控制器即小脑)的控制架构:
智能体作为大脑这一决策生成器,专注于生成高层级的行为。 重写后的句子:作为大脑的决策生成器,智能体专注于生成高层次的行为
作为小脑的运动控制器,控制器的主要职责是将高层行为(如预期目标点)转化为低层系统命令(如旋翼转速)
具体来说,研究团队认为这一成果主要有三项贡献。
研究团队提出了一种新的系统架构,可以应用于实际的机器人。该架构将基于多模态大模型的智能体具象化为大脑
而机器人运动规划器与控制器则被具象化为小脑,机器人的感知系统类比为人的眼、耳等信息收集器,机器人的执行机构类比为人的手等执行器。
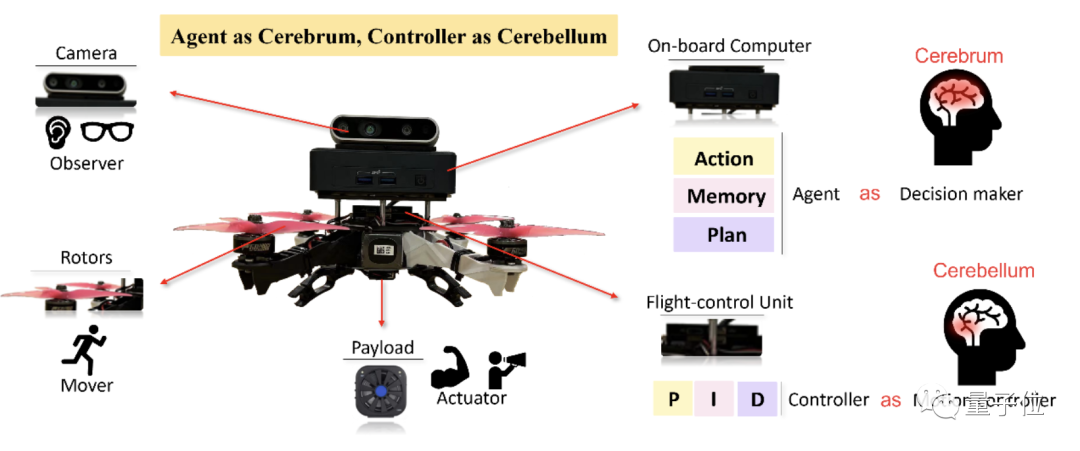
△图1 硬件系统架构
这些节点通过ROS相连,通过ROS中消息的订阅与发布或服务的请求与响应实现通信,区别于传统的端到端的机器人大模型控制。
这一架构使得Agent可以专注于高层级命令的产生,对于高层级任务具备更强的智能性,对于实际的执行具备更好的鲁棒性和可靠性。
需要重写的内容是:△图2 软件系统架构 重写后的内容:软件系统架构如图2所示
在这一架构下,作者构建了作为大脑的一种智能体AeroAgent。
该智能体主要包括三个部分:
同时,为了完成一个动作,可能需要多次交互操作以从传感器获取执行该动作所必需的参数,以确保智能体能够根据综合态势感知和所具备的执行器来稳定输出具体的行动
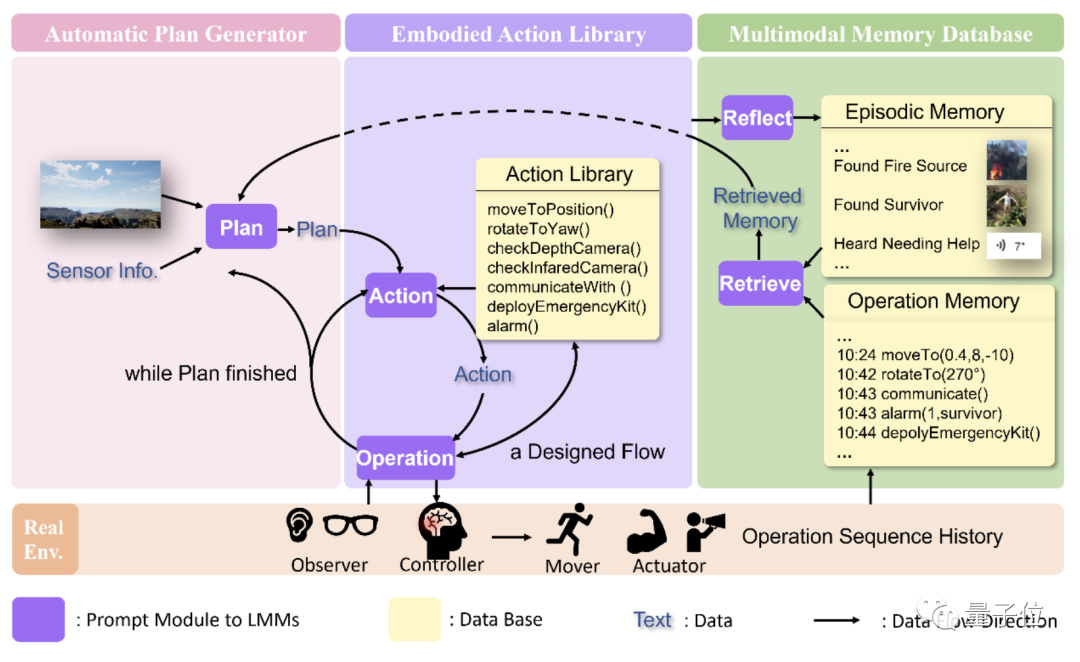
需要重写的内容是:△图3 AeroAgent模块架构 重写后的内容:△图3 AeroAgent 模块架构设计
为了给具身智能体和ROS机器人系统建立桥梁,让Agent产生的操作能够正确地、稳定地发送给ROS并被其他节点成功执行,同时让其他节点所提供的信息让LMM能够读取与理解,团队设计了了ROSchain——
一个将LLMs/LMMs与ROS连接起来的桥梁
ROSchain通过一套模块和应用程序接口(APIs)简化了大型模型与机器人传感装置、执行单元和控制机制的集成,为智能体接入ROS系统提供了一个稳定的中间件。
研究团队给出了三个原因,解释了为什么他们选择了无人机来进行该系统架构的测试和模拟
首先,如今LMMs中所蕴含的web-scale的世界知识,多为第三人称视角,人型机器人等领域的具身智能是类似于以人类为主体出发的第一人称视角。
无人机上的相机,尤其是下视相机,更像是第三人称视角(上帝视角)的有机体智能
另一方面,现阶段的LMMs无论是模型部署还是API服务,通常受限于计算资源导致响应有一定的延迟。
无人机的任务规划由于其可以悬停,具备应对延迟的能力,这对于自动驾驶等领域是一个应用的障碍
这两点都导致目前技术发展水平下无人机适合作为先驱进行相关理论与应用的验证。
第二,目前工业无人机领域,如山火救援、农林植保、无人放牧、电力巡检等,多由飞手与专家配合实际操作,智能化任务执行具有工业需求。
第三,从未来发展看,多智能体协同合作在物流、建筑、工厂等领域具备较为明显的需求。
而在这种领域中,无人机作为“上帝视角”的具身智能体,适合作为中央节点的领导者进行任务的分配,其他机器人可看作无人机的执行器的一环,所以这一研究也具有未来的发展前景。
团队使用airgen的仿真器进行了模拟实验,并同时选择了DRL等方式作为对照组。以下是实验结果:
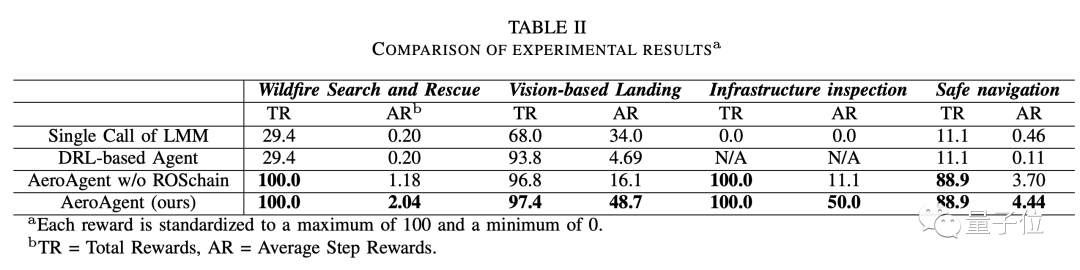
在野外火灾搜救的情景中,AeroAgent在标准化分数下获得了100分的优异成绩,平均每步为2.04分
而单纯调用LLM或基于DRL的智能体都只获得了29.4分,平均每步0.2,不足AeroAgent的十分之一。
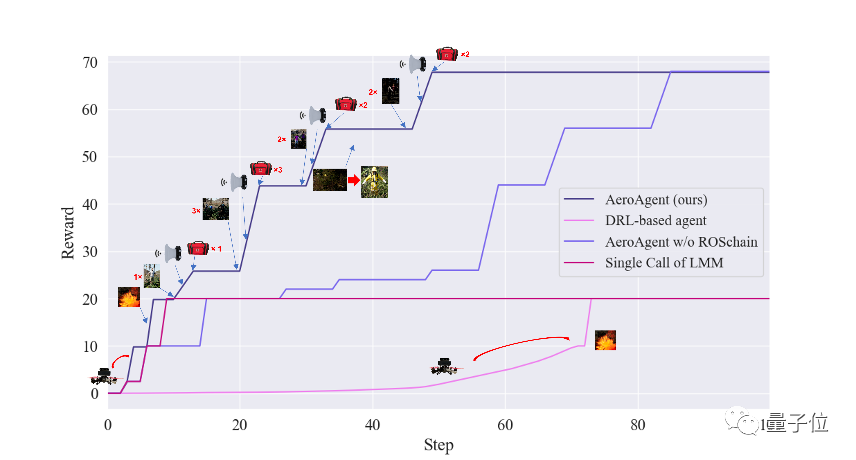
需要重写的内容是:△4-1号图,山火救援现场
在着陆任务中,AeroAgent也以97.4的总分和48.7的每步平均分超过了其他模型。
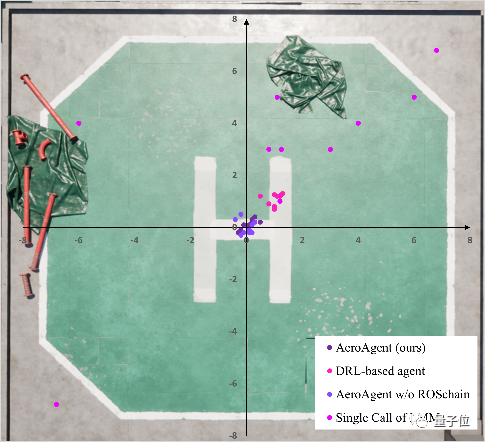
需要被改写的内容是:△图4-2 海上机坪着陆场景
而在风机巡检的测试中,AeroAgent直接成为了唯一能完成该任务的模型。
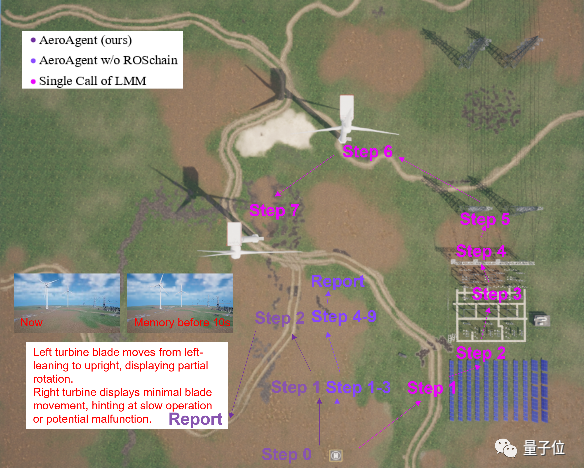
△图4-3 风力电机巡检场景
在导航任务上,AeroAgent 4.44每个步骤的分数分别为DRL和纯LLM的40倍和近10倍
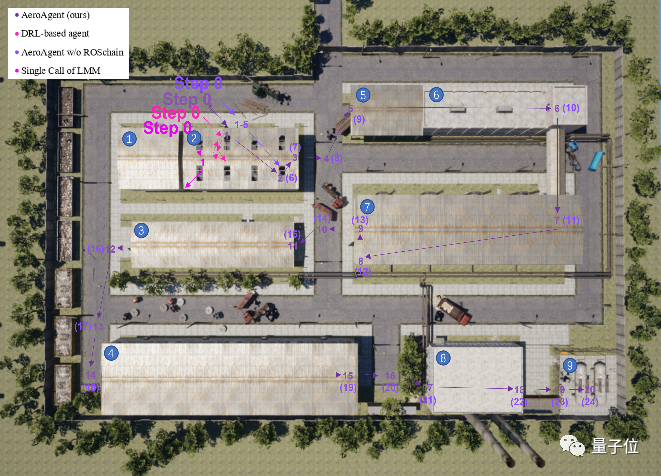
需要重新写的内容是:△图4-4 Airgen仿真实验
团队还在真实场景中进行了无人机系统的测试,以一个简单的受困群众引导实验为例进行了案例研究。
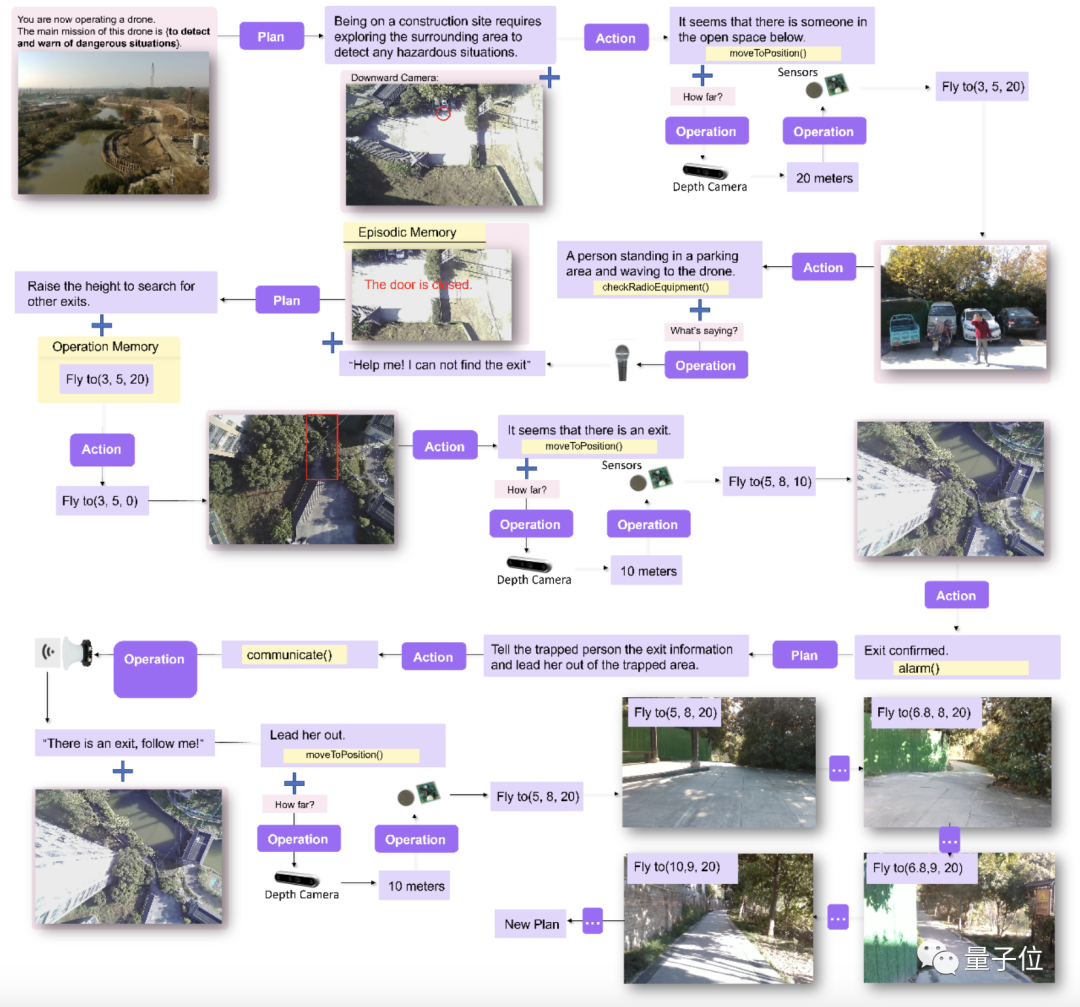
需要进行改写的内容是:△ 图5 引导受困群众案例实验
团队目前正以这一工作为基础,在某高原牦牛牧场进行无人放牧智能无人机的实验,探索其实际应用的可能性,并将以“予智能以具身”为目标,进行其他机器人/多机器人合作的智能体落地应用探索。
论文地址:https://arxiv.org/abs/2311.15033
以上是北航团队提出具身智能新架构,实现大型无人机的操控的详细内容。更多信息请关注PHP中文网其他相关文章!





















