

微软专利为AR眼镜面部追踪提出改善的传感器电容值测量

(映维网Nweon 2024年01月04日)头戴式设备可以包含用于追踪面部运动的面部追踪传感器。执行面部追踪的一种方法是使用面部追踪传感器阵列来测量电容值。当面部肌肉运动时,面部追踪传感器的电容会根据面部表面与相应传感器的接近程度而变化。
确定电容的一种可能方法是使用包含面部追踪传感器的感测电容的谐振LC电路。改变与感应电容的表面接近度可以导致谐振LC电路的谐振频率发生可测量的变化。然而,阵列的面部追踪传感器之间可能发生电容串扰,从而使得多个传感器同时执行电容测量变得复杂。
在名为“Determining charge on a facial-tracking sensor”的专利申请中,微软介绍的方法主要通过确定存储在感觉电容器的电极的电荷量来确定面部追踪传感器的感觉电容器的电容。
简单地说,面部追踪传感器包括配置成定位于靠近面部表面的感测电容器电极。所述感应电容器电极基于所述感应电容器电极与所述表面之间的距离形成电容。控制器对面部追踪传感器的感应电容电极施加参考电压。
然后,电荷传感电路通过确定由于施加参考电压而在感测电容器电极上累积的电荷量来确定感测电容器电极上的电容。
在一个实施例中,控制器同时沿着电荷传感电路和面部追踪传感器之间的电气连接将参考电压应用于shielding track。shielding track的参考电压有助于减少面部追踪传感器接收到的电容串扰。
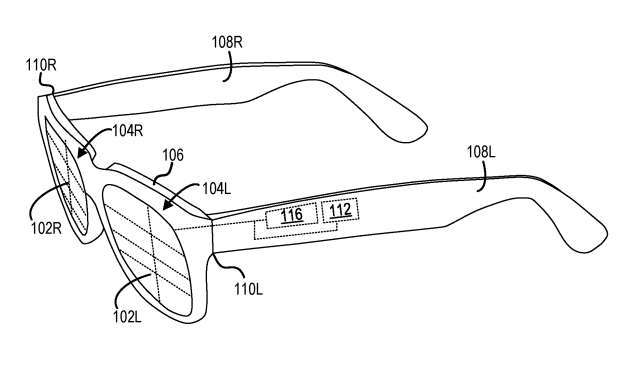
图1显示了包括多个面部追踪传感器的示例头戴式设备100。具体地说,头戴式设备100包括形成在头戴式设备100的左透镜104L的左感电容电极阵列102L和形成在右透镜104R的右感电容电极阵列102R。
左感电容器电极阵列102L和右感电容器电极阵列102R中的每一个包括多个感觉电容器电极,每个感觉电容器电极配置为感测佩戴者面部的不同区域。每个感测电容器电极配置为定位于靠近人脸的表面,并基于感测电容器电极与人脸表面之间的距离形成电容。
感测电容器电极阵列102L、102R由至少部分光学透明的导电薄膜形成。所述薄膜可包含一种或多种导电材料,如氧化铟锡、石墨烯或其他合适材料。薄膜可以通过任何合适的工艺形成,例如化学气相沉积。在感测电容器电极之间形成的沟槽可用于放置导电走线。由于导电膜不是完全光学透明,所以与相对较厚的涂层相比,使用相对较薄的膜用于感测电容器电极可以提供更大的透明度。
头戴式设备100同时包括多个电荷传感电路,如图112所示。多个电荷传感电路112中的每个电荷传感电路连接到相应的面部追踪传感器。每个电荷传感电路112配置为通过确定由于施加参考电压而在相应的传感电容器电极上累积的电荷量来确定相应的传感电容器电极的电容。
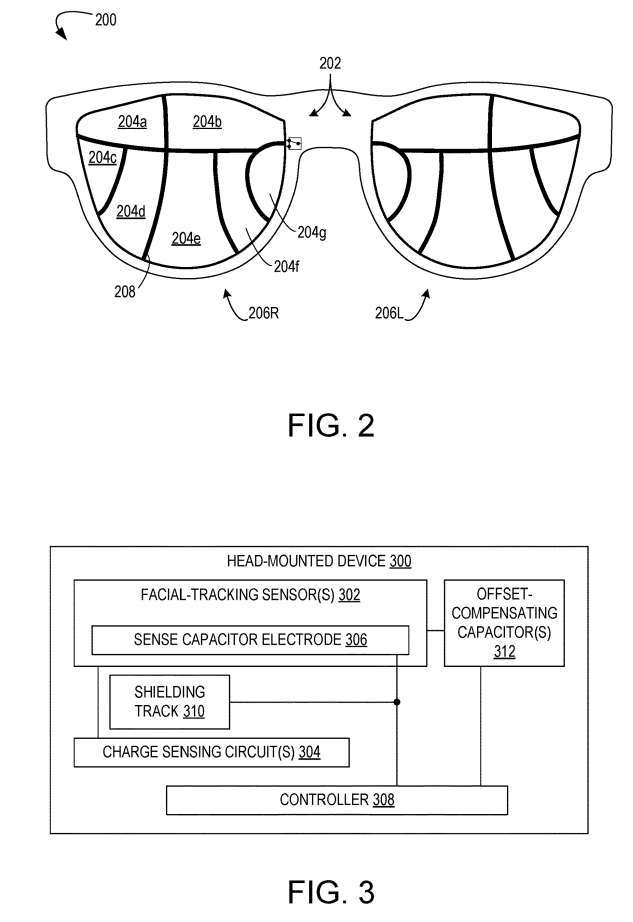
图2示出包含多个感测电容器电极的感测电容器电极阵列的示例布局202。如图所示,感测电容器电极204a-g由沟槽区域208隔开,用粗黑线表示。沟槽区208是缺乏形成感测电容器电极204a-g的导电膜的感测电容器电极之间的区域。沟槽区域208可以包括导电走线,以将传感电容器电极204a-g连接到电荷传感电路和/或其他电路。
由于形成感测电容器电极阵列的导电膜不是完全透明,所以在特定示例中可以看到布局202。然而,当并入配置为头戴式设备时,在大多数正常使用期间,布局202可以定位于比人眼焦距更近的位置。所以布局202可以在普通设备使用期间对用户失焦,因此不妨碍用户或分散用户的注意力。
图3示出示例头戴式设备300。头戴式设备300包括一个或多个面部追踪传感器302,以及相应的一个或多个电荷传感电路304。每个面部追踪传感器302包括配置为定位于靠近面部表面的感觉电容器电极306,它可以基于感觉电容器电极306与面部表面之间的距离形成电容。
头戴式设备300同时包括控制器308,其配置为将参考电压施加到一个或多个面部追踪传感器302的感测电容器电极306。
如上所述,每个电荷传感电路304配置为通过确定由参考电压产生的,并在传感电容器电极306积累的电荷量来确定相应的面部追踪传感器302的传感电容器电极306的电容。例如,电容C可以用Q=C*V来确定,其中V是参考电压,Q是由参考电压产生的在感测电容器电极306积累的电荷量。
在一个实施例中,每个电荷传感电路304进一步配置为至少基于对由参考电压产生的相应面部追踪传感器302的传感电容器电极306积累的电荷量进行过采样而产生多个电容位值。过采样包括对传感器电容电极306的电荷进行重复采样,并对重复采样进行滤波。
在一个实施例总,可以同时确定在多个感测电容器电极306中的每一个积累的电荷。因此,控制器308可以配置为并发操作相应的电荷传感电路304中的一个或多个。这样的配置可能有助于实现比利用面部追踪传感器的时间复用操作的配置更快的操作。
头戴式设备300同时包括沿一个或多个电荷传感电路304与相应的一个或多个面部追踪传感器302之间的电气连接的shielding track 310。shielding track 310可以帮助减少来自靠近一个或多个面部追踪传感器302与相应的一个或多个电荷传感电路304之间的电连接的导体的电干扰,例如传感电容器电极306之间的电容串扰。
减少电容串扰有助于减少传感误差和/或降低噪点。例如,shielding track 310可以帮助在头戴式设备300的电接地和电气连接之间电抵消杂散电容。
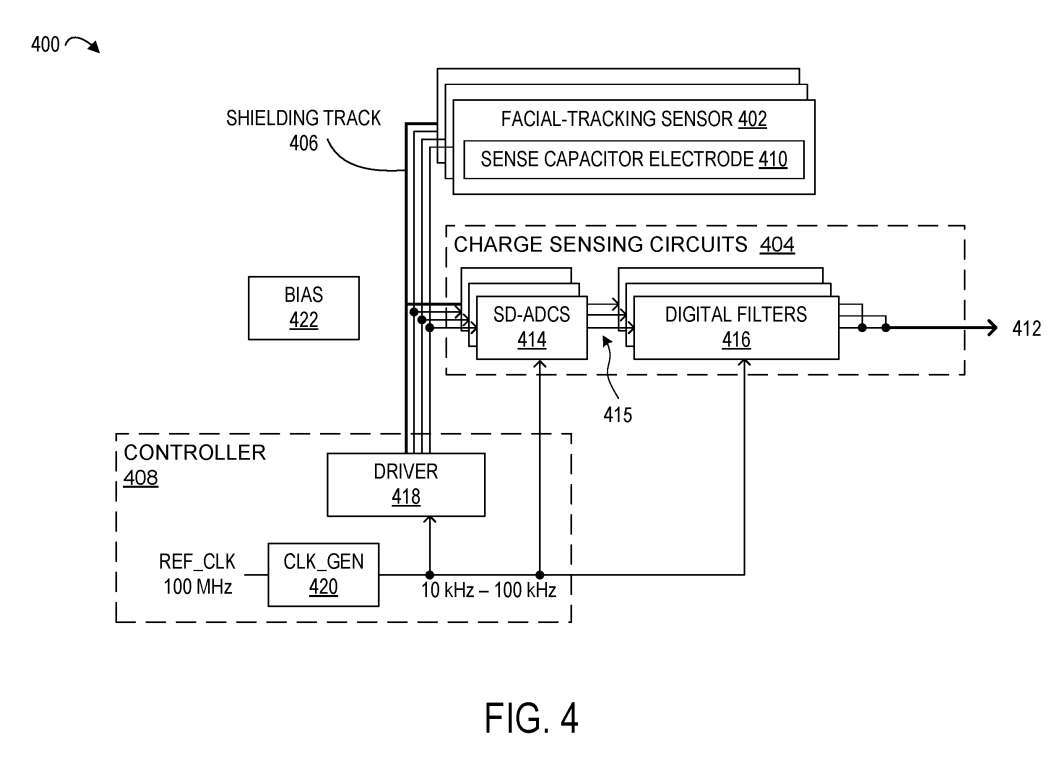
图4描述了头戴式设备400的更详细框图。头戴式设备400是头戴式设备300的示例实现。与头戴式设备300类似,头戴式设备400包括多个面部追踪传感器402、相应的多个电荷传感电路404、shielding track 406和控制器408。
与面部追踪传感器302类似,多个面部追踪传感器402中的每个面部追踪传感器包括感测电容器电极410。在所描述的实施例中,每个电荷传感电路404配置为至少基于对积累的电荷量进行过采样而产生多个电容位值412。每个电荷传感电路404包括一个SD-ADC 414和一个连接到SD-ADC 414输出端的数字滤波器416。
作为示例,SD-ADC 414对电荷传感电路404的输入进行过采样,并输出位流415。位流至少基于对输入进行过采样而指示累积的电荷量。
在一个实施例中,过采样可包括50至256范围内的过采样比。在其它实施例中,过采样可包括任何其它合适的过采样比。输入过采样可能有助于提高SD-ADC 414的精度,允许模数转换的噪点整形,和/或降低SD-ADC 414的设计复杂性。作为示例,噪点整形可以将噪点塑造为更高的频率,并且因此可以促进噪点的滤波。
数字滤波器416将位流415从SD-ADC 414转换为多个电容位值412,并过滤来自多个电容位值412的高频噪声。这种噪点滤波有助于提高信噪比。在SD-ADC 414包括二阶SD-ADC的示例中,数字滤波器416包括二阶滤波器。在其他示例中,每个SD-ADC 414和每个数字滤波器416可以分别包含任何合适顺序的SD-ADC和数字滤波器。
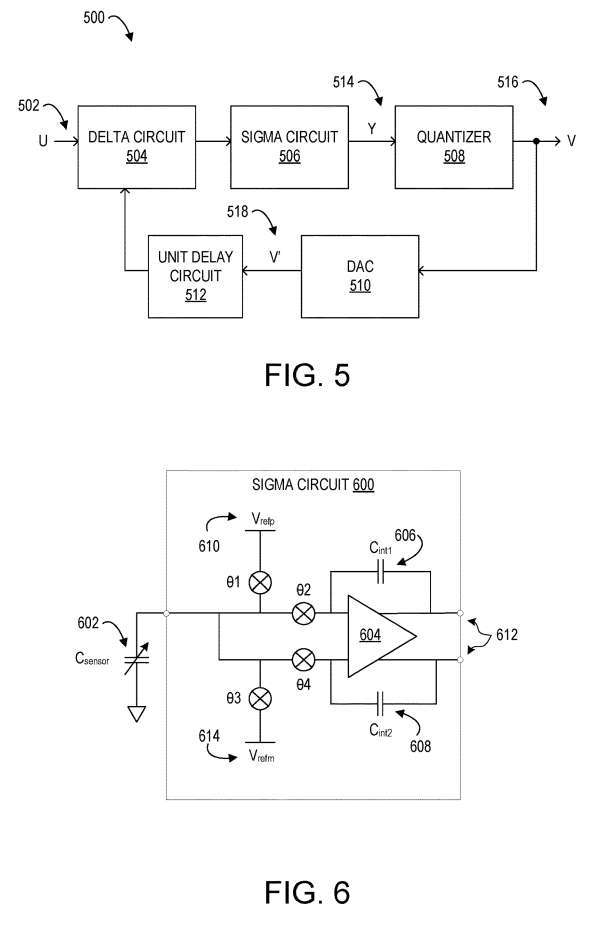
图5描述了示例SD-ADC 500的框图。SD-ADC 500是SD-ADC 414的一个示例实现。SD-ADC 500接收模拟输入U 502,并通过增量电路504、Sigma电路506和量化器508输出数字输出V。
SD-ADC 500同时包括包括数字模拟转换器DAC 510和单位延迟电路512的反馈路径。Delta电路504比较输入U 502和反馈路径输出之间的差值。例如,增量电路504可以比较输入U 502和反馈路径输出之间的模拟电压差。
接下来,Sigma电路506被配置为输出节点y514,至少基于Delta电路504随时间的输出的平均值。随时间的平均值可以在连续时间或离散时间确定。Sigma电路506可以包括如下所述的积分器电路和/或任何其他合适的电路。
接着,量化器508对节点y514进行采样,并基于节点y514的采样值输出数字值,形成位流516。作为具体示例,量化器508可以包括一个比较器电路,比较器电路配置为当节点y514分别低于量化器参考电压或高于量化器参考电压时,在一个时钟周期上输出逻辑0或逻辑1。
图6示出连接到感测电容器电极602的示例Sigma电路600。例如,SD-ADC 414和SD-ADC 500可以使用Sigma电路600。Sigma电路600包括具有第一积分器电容器606和第二积分器电容器608的积分器604。西格玛电路600的操作通过第一控制点θ1、第二控制点θ2、第三控制点θ3和第四个控制点θ4来控制。在一些示例中,Sigma电路600之外的控制器(例如控制器408)可以控制第一、第二、第三和第四个控制点。
当第一控制点θ1导电时,第一参考电压610连接到感测电容器电极602。这样,将第一参考电压610施加到感测电容器电极602。然后,第一控制点θ1打开,第二控制点θ2导通,将参考电压产生的积累在感测电容器电极602的电荷传递给第一积分器电容器606。第一积分器电容器606和积分器604根据所积累的电荷输出电压。
在另一实施例中,当第一控制点θ1打开时,第二控制点θ2和第四控制点θ4导通,将在感应电容器电极602积累的电荷传递给第一积分器电容器606和第二积分器电容器608。
在这样的配置中,积分器604完全微分,并且累积的电荷在第一和第二积分器电容器606、608之间被分割。因此,输出电压在积分器604的输出节点之间分割,如612所示。全差分积分器可以帮助提高SD-ADC的精度,降低对杂散噪点和/或耦合的敏感性,和/或降低SD-ADC的设计复杂性。
接着,当第三控制点θ3导通时,连接第二参考电压614并将其施加到感测电容器电极602。在所描述的实施例中,施加第一参考电压610在第一周期中将在感测电容器电极602积累的电荷定向到积分器604的非反相输入,施加第二参考电压614在第二周期中将在感测电容器电极602积累的电荷定向到积分器604的反相输入。
同样,第三控制点θ3打开,第四控制点θ4导通,将在感应电容器电极602积累的电荷传递给第二积分器电容器608。然后,第二积分器电容器608和积分器604基于所积累的电荷输出电压。在其他实施例中,第一、第二、第三和第四控制点可以任何其他合适的方式进行控制。
在一个实施例中,设备的一个或多个面部追踪传感器可以在电上看到大于到面部上近处点的电容的偏置电容,这可能干扰对面部的较小电容的传感。可以通过使用具有与偏移电容相似或等效电容值的电容器来电抵消这种偏移电容。
然而,更大的电容器可能消耗更大的面积。因此,图7示出的头戴式设备700利用可连接到感测电容器电极704的相对较小的固定电容器702来电抵消偏置电容706。
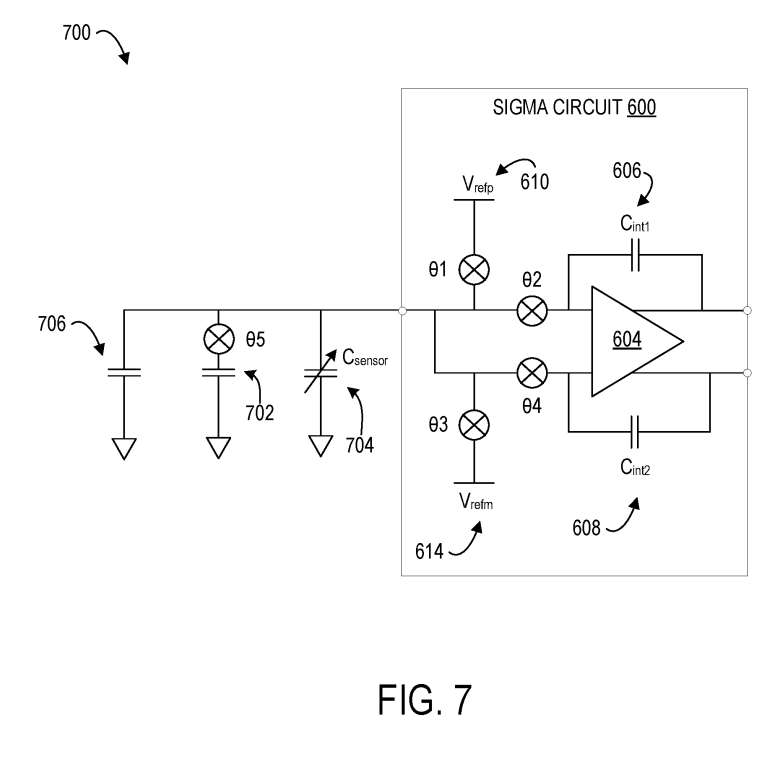
在所描述的示例中,如上所述,第一控制点θ1导通,并将第一参考电压610施加于感测电容器电极704。然后,第一控制点θ1打开,位于固定电容器702连接上的第五控制点θ5拨动以电抵消感应电容器电极704上的偏置电容706。开关的数量可以基于固定电容器702的电容值和偏置电容706的值。
例如,当偏置电容706比固定电容702大10倍时,则第五控制点θ5可以切换10次以电抵消偏置电容706。与省略这种切换的实现相比,使用第五个控制点θ5的切换可以帮助减小头戴式设备700上的固定电容器702的尺寸。图7所示为单个感测电容器电极、固定电容器和Sigma电路,其他实施例可包括多个感测电容器电极以及相应的多个固定电容器和西格玛电路。
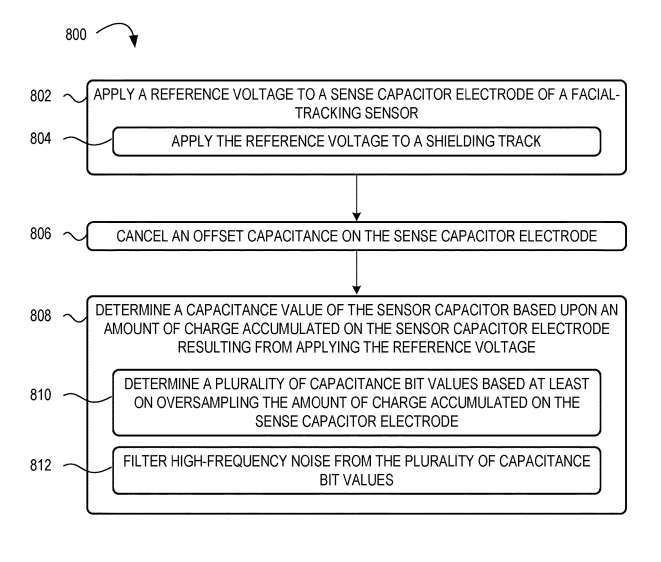
图8描述了确定感测电容器电极电容值的示例方法800的流程图。
在802,对面部追踪传感器的感应电容电极施加参考电压。
在804,沿着面部追踪传感器和电荷传感电路之间的电气连接将参考电压施加到shielding track。将参考电压施加到屏蔽轨道上可以帮助电抵消头戴式设备上多个面部追踪传感器的感测电容器电极之间的电容。另外,将所述参考电压施加到所述屏蔽轨迹可有助于使能够同时操作相应的多个电荷传感电路。
如上所述,头戴式设备可以在感测电容器电极看到偏移电容。在这样的实例中,806包括通过切换偏移补偿电容器的连接来放电偏移电容,从而消除感应电容器电极上的偏移电容。
在一个实施例中,偏移补偿电容器可包括可多次切换的较小的固定电容器。以这种方式,较小的固定电容可以电地抵消较大的偏置电容。在其它示例中,偏移补偿电容器可包括可编程电容器,可选择性地控制以调整电容值。
继续在808,基于由于施加参考电压而在面部追踪传感器的感测电容器电极积累的电荷量,确定面部追踪传感器的感测电容器电极的电容值。
在一个实施例中,确定所述感测电容器电极的电容值包括至少基于对所述面部追踪传感器的所述感测电容器电极积累的电荷量进行过采样来确定多个电容位值,如810所示。
作为示例,多个电容位值可以包括指示在感测电容器电极上积累的电荷量的二进制数。如前所述,SD-ADC可以将多个电容位值上的噪点塑造为更高的频率。因此,方法800在812包括从多个电容位值滤除高频噪点。滤波高频噪点有助于提高电容位值的信噪比。
相关专利:Microsoft Patent | Determining charge on a facial-tracking sensor
名为“Determining charge on a facial-tracking sensor”的微软专利申请最初在2022年6月提交,并在日前由美国专利商标局公布。
需要注意的是,一般来说,美国专利申请接收审查后,自申请日或优先权日起18个月自动公布或根据申请人要求在申请日起18个月内进行公开。注意,专利申请公开不代表专利获批。在专利申请后,美国专利商标局需要进行实际审查,时间可能在1年至3年不等。
另外,这只是一份专利申请,不代表一定通过,同时不确定是否会实际商用及实际的应用效果。
以上是微软专利为AR眼镜面部追踪提出改善的传感器电容值测量的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
本文回顾了AI最高的艺术生成器,讨论了他们的功能,对创意项目的适用性和价值。它重点介绍了Midjourney是专业人士的最佳价值,并建议使用Dall-E 2进行高质量的可定制艺术。
 开始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
开始使用Meta Llama 3.2 -Analytics Vidhya
Apr 11, 2025 pm 12:04 PM
Meta的Llama 3.2:多模式和移动AI的飞跃 Meta最近公布了Llama 3.2,这是AI的重大进步,具有强大的视觉功能和针对移动设备优化的轻量级文本模型。 以成功为基础
 最佳AI聊天机器人比较(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
最佳AI聊天机器人比较(Chatgpt,Gemini,Claude&更多)
Apr 02, 2025 pm 06:09 PM
本文比较了诸如Chatgpt,Gemini和Claude之类的顶级AI聊天机器人,重点介绍了其独特功能,自定义选项以及自然语言处理和可靠性的性能。
 Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4当前可用并广泛使用,与诸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和产生连贯的响应方面取得了重大改进。未来的发展可能包括更多个性化的间
 顶级AI写作助理来增强您的内容创建
Apr 02, 2025 pm 06:11 PM
顶级AI写作助理来增强您的内容创建
Apr 02, 2025 pm 06:11 PM
文章讨论了Grammarly,Jasper,Copy.ai,Writesonic和Rytr等AI最高的写作助手,重点介绍了其独特的内容创建功能。它认为Jasper在SEO优化方面表现出色,而AI工具有助于保持音调的组成
 选择最佳的AI语音生成器:评论的顶级选项
Apr 02, 2025 pm 06:12 PM
选择最佳的AI语音生成器:评论的顶级选项
Apr 02, 2025 pm 06:12 PM
本文评论了Google Cloud,Amazon Polly,Microsoft Azure,IBM Watson和Discript等高级AI语音生成器,重点介绍其功能,语音质量和满足不同需求的适用性。
 构建AI代理的前7个代理抹布系统
Mar 31, 2025 pm 04:25 PM
构建AI代理的前7个代理抹布系统
Mar 31, 2025 pm 04:25 PM
2024年见证了从简单地使用LLM进行内容生成的转变,转变为了解其内部工作。 这种探索导致了AI代理的发现 - 自主系统处理任务和最少人工干预的决策。 Buildin
 AV字节:Meta' llama 3.2,Google的双子座1.5等
Apr 11, 2025 pm 12:01 PM
AV字节:Meta' llama 3.2,Google的双子座1.5等
Apr 11, 2025 pm 12:01 PM
本周的AI景观:进步,道德考虑和监管辩论的旋风。 OpenAI,Google,Meta和Microsoft等主要参与者已经释放了一系列更新,从开创性的新车型到LE的关键转变
