

谷歌Deepmind设想重塑机器人,为大型模型引入具身智能的未来

过去一年中,连连取得突破的大模型正在重塑机器人研究领域。
随着最先进的大模型成为机器人的"大脑",机器人的进化速度超乎想象。
7 月,谷歌 DeepMind 宣布推出 RT-2:全球第一个控制机器人的视觉 - 语言 - 动作(VLA)模型。
只需要向对话一样下达命令,它就能在一堆图片中辨认出霉霉,送给她一罐「快乐水」。
甚至能主动思考,完成了从「选择灭绝的动物」到抓取桌子上的塑料恐龙这种多阶段推理的飞跃。
在 RT-2 之后,谷歌 DeepMind 又提出了 Q-Transformer,机器人界也有了自己的 Transformer 。Q-Transformer 使得机器人突破了对高质量的演示数据的依赖,更擅长依靠自主「思考」来积累经验。
RT-2 发布仅两个月,又迎来了机器人的 ImageNet 时刻。谷歌 DeepMind 联合其他机构推出了 Open X-Embodiment 数据集,改变了以往需要针对每个任务、机器人具体定制模型的方法,将各种机器人学的知识结合起来,创造出了一种训练通用机器人的新思路。
可以想象一下,只需向你的机器人小助理发出简单的要求,比如「打扫房子」或「做一顿美味健康的饭菜」,它们就可以完成这些任务。对于人类来说,这些工作可能很简单,但对于机器人来说,需要它们对世界有深度理解,这并非易事。
基于在机器人 Transformer 领域深耕多年的研究基础, 近期,谷歌宣布了一系列机器人研究进展:AutoRT、SARA-RT 和 RT-Trajectory,它们能够帮助机器人更快地做出决策,更好地理解它们身处于怎样的环境,更好地指导自己完成任务。
谷歌相信随着 AutoRT、SARA-RT 和 RT-Trajectory 等研究成果的推出,能为现实的世界机器人的数据收集、速度和泛化能力带来增益。
接下来,让我们回顾一下这几项重要研究。
AutoRT:利用大型模型更好地训练机器人
AutoRT 结合了大型基础模型(如大型语言模型(LLM)或视觉语言模型(VLM))和机器人控制模型(RT-1 或 RT-2),创建了一个可以在新环境中部署机器人用以收集训练数据的系统。AutoRT 可以同时指导多个配备了视频摄像机和末端执行器的机器人,在各种各样环境中执行多样化的任务。
具体来说,每个机器人将根据 AutoRT,使用视觉语言模型(VLM)来「看看四周」,了解其环境和视线内的物体。接下来,大型语言模型会为其提出一系列创造性任务,例如「将零食放在桌子上」,并扮演决策者的角色,为机器人选择需要执行的任务。
研究人员在现实世界中对 AutoRT 进行了长达七个月的广泛评估。实验证明,AutoRT 系统能够同时安全地协调多达 20 个机器人,最多时共能协调 52 个机器人。通过指导机器人在各种办公楼内执行各种任务,研究人员收集了涵盖 77,000 个机器人试验,6,650 个独特任务的多样化数据集。
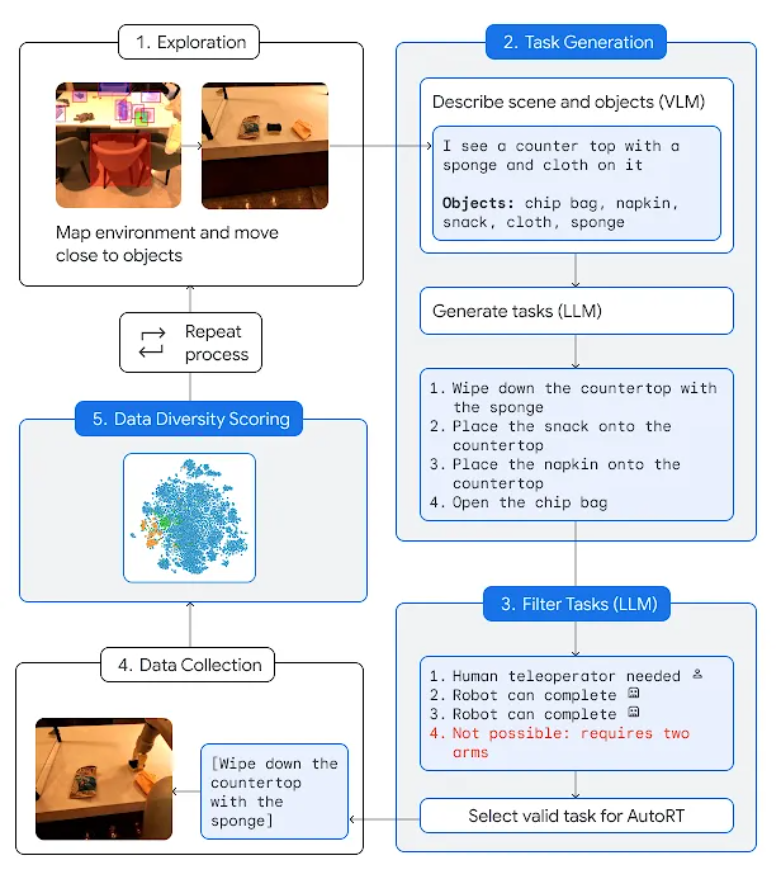
上图呈现了 AutoRT 系统的运作过程:(1)自主轮式机器人找到了一个有多个物体的位置。(2)VLM 向 LLM 描述场景和物体。(3)LLM 为机器人提出各种操作任务,并决定哪些任务机器人可以独立完成,哪些任务需要人类远程控制,哪些任务不可能完成,然后做出选择。(4)机器人尝试选择要做的任务,收集实验数据,并对数据的多样性和新鲜度进行评分。机器人将不断重复这个过程。
AutoRT 具有利用大型基础模型的潜力,这对于机器人理解实际应用中的人类指令至关重要。通过收集更全面的实验训练数据和更多样化的数据,AutoRT 能够扩展机器人的学习能力,为现实世界的机器人训练带来提升。
在机器人融入我们的日常生活之前,需要保证它们的安全性,这要求研究者做到负责任地开发,并对机器人的安全性进行深度研究。
虽然 AutoRT 现在只是一个数据收集系统,但可以将其视为现实世界中自主机器人的早期阶段。它具有安全护栏,其中一项是一套以安全为重点的提示词,它能够在机器人执行基于 LLM 的决策时提供需要遵守的基本规则。
这些规则部分受到艾萨克・阿西莫夫的机器人三定律的启发,其中最重要的是机器人「不得伤害人类」。安全规则还要求机器人不得尝试涉及人类、动物、尖锐物体或电器的任务。
仅在提示词方面下功夫,也无法完全保证机器人实际应用中的安全问题。因此,AutoRT 系统还包含实用安全措施层这一机器人技术的经典设计。例如,协作机器人的程序被设定为如果其关节上的力超过给定阈值,则自动停止,并且所有自主控制的机器人都能够通过物理停用开关被限制在人类监督员的视线范围内。
SARA-RT:让机器人 Transformer(RT)变得更快、更精简
另一项成果 SARA-RT,可将机器人 Transformer(RT)模型转换为更高效的版本。
谷歌团队开发的 RT 神经网络架构已被用于最新的机器人控制系统,包括 RT-2 模型。最好的 SARA-RT-2 模型在获得简短的图像历史记录后,比 RT-2 模型的精确度高 10.6%,速度快 14%。谷歌表示,这是首个在不降低质量的情况下提高计算能力的可扩展注意力机制。
虽然 Transformer 功能强大,但它们可能会受到计算需求的限制,从而减慢决策速度。Transformer 主要依赖于二次复杂度的注意力模块。这意味着,如果 RT 模型的输入增加一倍(例如,为机器人提供更多或更高分辨率的传感器),处理该输入所需的计算资源就会增加四倍,从而导致决策速度减慢。
SARA-RT 采用了一种新颖的模型微调方法(称为「向上训练」)来提高模型的效率。向上训练将二次复杂性转换为单纯的线性复杂性,从而大幅降低了计算要求。这种转换不仅能提高原始模型的速度,还能保持其质量。
谷歌希望许多研究人员和从业人员能将这一实用系统应用于机器人技术及其他领域。由于 SARA 提供了加快 Transformer 速度的通用方法,无需进行计算成本高昂的预训练,因此这种方法具有大规模推广 Transformer 技术的潜力。SARA-RT 不需要任何额外的代码,因为可以使用各种开源的线性变体。
当 SARA-RT 应用于拥有数十亿个参数的 SOTA RT-2 模型,它能在各种机器人任务中实现更快的决策和更好的性能:
用于操纵任务的 SARA-RT-2 模型。机器人的动作以图像和文本指令为条件。
凭借其坚实的理论基础,SARA-RT 可应用于各种 Transformer 模型。例如,将 SARA-RT 应用于点云 Transformer(用于处理来自机器人深度摄像头的空间数据),其速度能够提高一倍以上。
RT-Trajectory:帮助机器人泛化
人类可以直观地理解、学会如何擦桌子,但机器人需要许多可能的方式将指令转化为实际的物理动作。
传统上,对机械臂的训练依赖于将抽象的自然语言(擦桌子)映射到具体的动作(关闭抓手、向左移动、向右移动),这使得模型很难推广到新任务中。与此相反,RT - 轨迹模型通过解释具体的机器人动作(如视频或草图中的动作),使 RT 模型能够理解 「如何完成」任务。
RT-Trajectory 模型能自动添加视觉轮廓,描述训练视频中的机器人动作。RT-Trajectory 将训练数据集中的每段视频与机器人手臂执行任务时抓手的 2D 轨迹草图叠加在一起。这些轨迹以 RGB 图像的形式,为模型学习机器人控制策略提供了低层次、实用的视觉提示。
在对训练数据中未见的 41 项任务进行测试时,由 RT-Trajectory 控制的机械臂的性能比现有的 SOTA RT 模型高出一倍多:任务成功率达到 63%,而 RT-2 的成功率仅为 29%。
该系统的用途十分广泛,RT-Trajectory 还可以通过观看人类对所需任务的演示来创建轨迹,甚至可以接受手绘草图。而且,它还能随时适应不同的机器人平台。
 左图:只使用自然语言数据集训练的 RT 模型控制的机器人,在执行擦桌子这一新任务时受挫,而由 RT 轨迹模型控制的机器人,在经过 2D 轨迹增强的相同数据集训练后,成功规划并执行了擦拭轨迹。右图:训练有素的 RT 轨迹模型在接到新任务(擦桌子)后,可以在人类的协助下或利用视觉语言模型自行以多种方式创建 2D 轨迹。
左图:只使用自然语言数据集训练的 RT 模型控制的机器人,在执行擦桌子这一新任务时受挫,而由 RT 轨迹模型控制的机器人,在经过 2D 轨迹增强的相同数据集训练后,成功规划并执行了擦拭轨迹。右图:训练有素的 RT 轨迹模型在接到新任务(擦桌子)后,可以在人类的协助下或利用视觉语言模型自行以多种方式创建 2D 轨迹。
RT 轨迹利用了丰富的机器人运动信息,这些信息存在于所有机器人数据集中,但目前尚未得到充分利用。RT-Trajectory 不仅代表着在制造面向新任务高效准确移动的机器人的道路上又迈进了一步,而且还能从现有数据集中发掘知识。
以上是谷歌Deepmind设想重塑机器人,为大型模型引入具身智能的未来的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 DeepMind机器人打乒乓球,正手、反手溜到飞起,全胜人类初学者
Aug 09, 2024 pm 04:01 PM
DeepMind机器人打乒乓球,正手、反手溜到飞起,全胜人类初学者
Aug 09, 2024 pm 04:01 PM
但可能打不过公园里的老大爷?巴黎奥运会正在如火如荼地进行中,乒乓球项目备受关注。与此同时,机器人打乒乓球也取得了新突破。刚刚,DeepMind提出了第一个在竞技乒乓球比赛中达到人类业余选手水平的学习型机器人智能体。论文地址:https://arxiv.org/pdf/2408.03906DeepMind这个机器人打乒乓球什么水平呢?大概和人类业余选手不相上下:正手反手都会:对手采用多种打法,该机器人也能招架得住:接不同旋转的发球:不过,比赛激烈程度似乎不如公园老大爷对战。对机器人来说,乒乓球运动
 首配机械爪!元萝卜亮相2024世界机器人大会,发布首个走进家庭的国际象棋机器人
Aug 21, 2024 pm 07:33 PM
首配机械爪!元萝卜亮相2024世界机器人大会,发布首个走进家庭的国际象棋机器人
Aug 21, 2024 pm 07:33 PM
8月21日,2024世界机器人大会在北京隆重召开。商汤科技旗下家用机器人品牌“元萝卜SenseRobot”家族全系产品集体亮相,并最新发布元萝卜AI下棋机器人——国际象棋专业版(以下简称“元萝卜国象机器人”),成为全球首个走进家庭的国际象棋机器人。作为元萝卜的第三款下棋机器人产品,全新的国象机器人在AI和工程机械方面进行了大量专项技术升级和创新,首次在家用机器人上实现了通过机械爪拾取立体棋子,并进行人机对弈、人人对弈、记谱复盘等功能,
 Claude也变懒了!网友:学会给自己放假了
Sep 02, 2024 pm 01:56 PM
Claude也变懒了!网友:学会给自己放假了
Sep 02, 2024 pm 01:56 PM
开学将至,该收心的不止有即将开启新学期的同学,可能还有AI大模型。前段时间,Reddit上挤满了吐槽Claude越来越懒的网友。「它的水平下降了很多,经常停顿,甚至输出也变得很短。在发布的第一周,它可以一次性翻译整整4页文稿,现在连半页都输出不了了!」https://www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/在一个名为「对Claude彻底失望了的帖子里」,满满地
 世界机器人大会上,这家承载「未来养老希望」的国产机器人被包围了
Aug 22, 2024 pm 10:35 PM
世界机器人大会上,这家承载「未来养老希望」的国产机器人被包围了
Aug 22, 2024 pm 10:35 PM
正在北京举行的世界机器人大会上,人形机器人的展示成为了现场绝对的焦点,在星尘智能的展台上,由于AI机器人助理S1在一个展区上演扬琴、武术、书法三台大戏,能文能武,吸引了大量专业观众和媒体的驻足。在带弹性的琴弦上的优雅演奏,让S1展现出速度、力度、精度兼具的精细操作和绝对掌控。央视新闻对「书法」背后的模仿学习和智能控制进行了专题报道,公司创始人来杰解释到,丝滑动作的背后,是硬件侧追求最好力控和最仿人身体指标(速度、负载等),而是在AI侧则采集人的真实动作数据,让机器人遇强则强,快速学习进化。而敏捷
 ACL 2024奖项公布:华科大破译甲骨文最佳论文之一、GloVe时间检验奖
Aug 15, 2024 pm 04:37 PM
ACL 2024奖项公布:华科大破译甲骨文最佳论文之一、GloVe时间检验奖
Aug 15, 2024 pm 04:37 PM
本届ACL大会,投稿者「收获满满」。为期六天的ACL2024正在泰国曼谷举办。ACL是计算语言学和自然语言处理领域的顶级国际会议,由国际计算语言学协会组织,每年举办一次。一直以来,ACL在NLP领域的学术影响力都位列第一,它也是CCF-A类推荐会议。今年的ACL大会已是第62届,接收了400余篇NLP领域的前沿工作。昨天下午,大会公布了最佳论文等奖项。此次,最佳论文奖7篇(两篇未公开)、最佳主题论文奖1篇、杰出论文奖35篇。大会还评出了资源论文奖(ResourceAward)3篇、社会影响力奖(
 鸿蒙智行享界S9及全场景新品发布会,多款重磅新品齐发
Aug 08, 2024 am 07:02 AM
鸿蒙智行享界S9及全场景新品发布会,多款重磅新品齐发
Aug 08, 2024 am 07:02 AM
今天下午,鸿蒙智行正式迎来了新品牌与新车。 8月6日,华为举行鸿蒙智行享界S9及华为全场景新品发布会,带来了全景智慧旗舰轿车享界S9、问界新M7Pro和华为novaFlip、MatePadPro12.2英寸、全新MatePadAir、华为毕升激光打印机X1系列、FreeBuds6i、WATCHFIT3和智慧屏S5Pro等多款全场景智慧新品,从智慧出行、智慧办公到智能穿戴,华为全场景智慧生态持续构建,为消费者带来万物互联的智慧体验。鸿蒙智行:深度赋能,推动智能汽车产业升级华为联合中国汽车产业伙伴,为
 李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o
Sep 03, 2024 pm 05:18 PM
李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o
Sep 03, 2024 pm 05:18 PM
视觉与机器人学习的深度融合。当两只机器手丝滑地互相合作叠衣服、倒茶、将鞋子打包时,加上最近老上头条的1X人形机器人NEO,你可能会产生一种感觉:我们似乎开始进入机器人时代了。事实上,这些丝滑动作正是先进机器人技术+精妙框架设计+多模态大模型的产物。我们知道,有用的机器人往往需要与环境进行复杂精妙的交互,而环境则可被表示成空间域和时间域上的约束。举个例子,如果要让机器人倒茶,那么机器人首先需要抓住茶壶手柄并使之保持直立,不泼洒出茶水,然后平稳移动,一直到让壶口与杯口对齐,之后以一定角度倾斜茶壶。这
 分布式人工智能盛会DAI 2024征稿:Agent Day,强化学习之父Richard Sutton将出席!颜水成、Sergey Levine以及DeepMind科学家将做主旨报告
Aug 22, 2024 pm 08:02 PM
分布式人工智能盛会DAI 2024征稿:Agent Day,强化学习之父Richard Sutton将出席!颜水成、Sergey Levine以及DeepMind科学家将做主旨报告
Aug 22, 2024 pm 08:02 PM
会议简介随着科技的飞速发展,人工智能已经成为了推动社会进步的重要力量。在这个时代,我们有幸见证并参与到分布式人工智能(DistributedArtificialIntelligence,DAI)的创新与应用中。分布式人工智能是人工智能领域的重要分支,这几年引起了越来越多的关注。基于大型语言模型(LLM)的智能体(Agent)异军突起,通过结合大模型的强大语言理解和生成能力,展现出了在自然语言交互、知识推理、任务规划等方面的巨大潜力。AIAgent正在接棒大语言模型,成为当前AI圈的热点话题。Au
