

乐聚人形机器人'夸父”通过 OpenHarmony 3.2 兼容性验证

据OpenHarmony官方公众号消息,乐聚旗下的"夸父"机器人今日宣布通过OpenHarmony 3.2 Release版本的兼容性测评
据报道,夸父机器人是由深圳开鸿联合乐聚机器人技术有限公司(简称“乐聚”)共同开发的,被称为是“国内首款具备跳跃和适应多种地形行走能力的开源鸿蒙人形机器人”
▲ 图片来源 乐聚官网(下同)
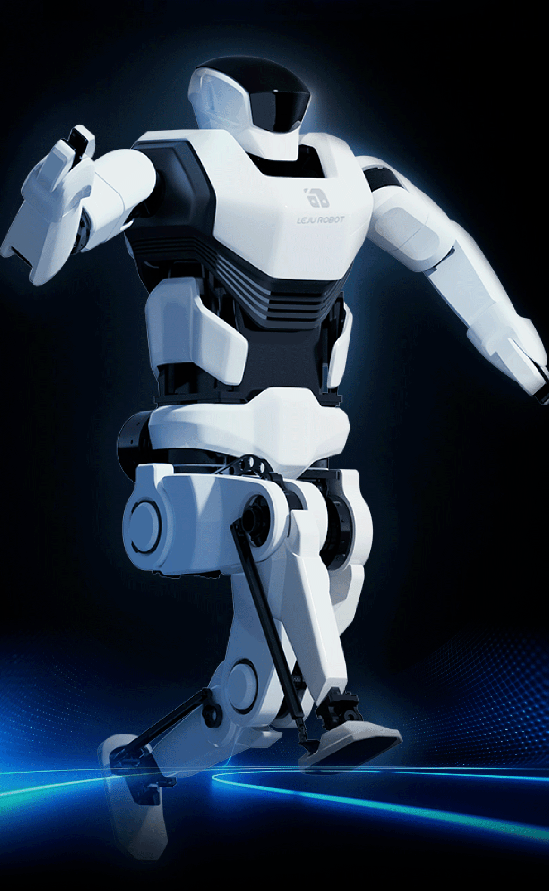
IT之家从消息中了解到,该机器人搭载了深开鸿基于开源鸿蒙研发的KaihongOS操作系统,采用了全栈开源设计,并且运动控制器完全开源。该机器人可以接入轨迹规划、反馈控制、状态估计等模块,而且其步态算法声称可以适应各种地形,包括沙地、草地和障碍物等,并且可以跳跃高度达到20厘米
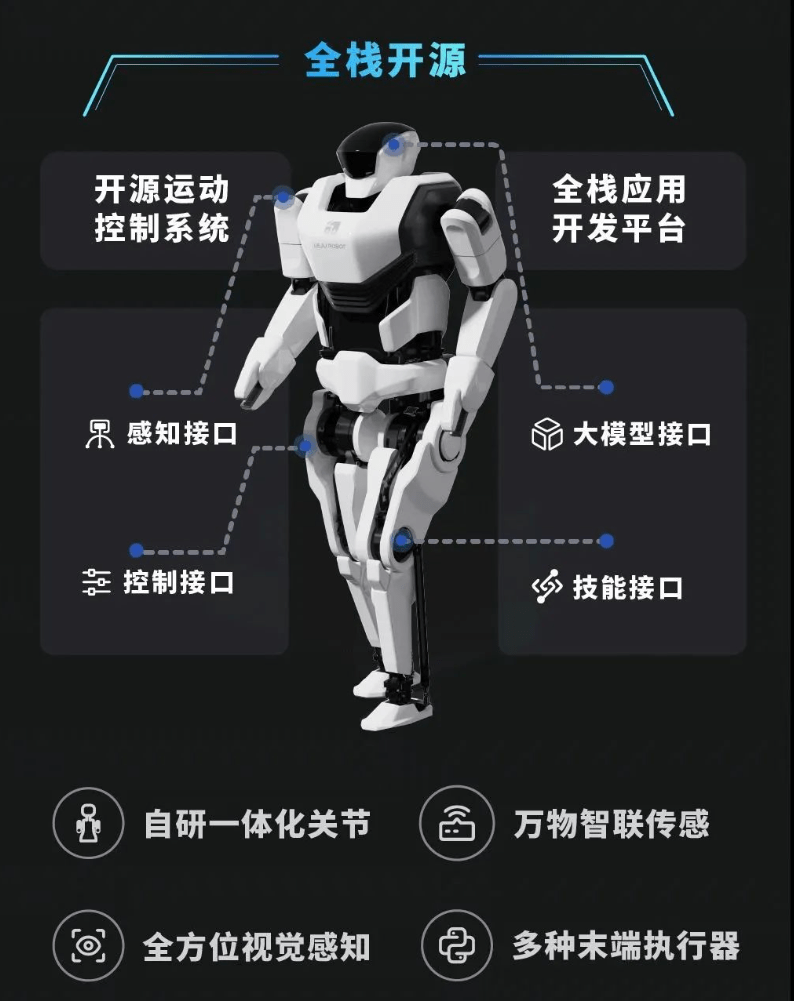
在感知方面,这款机器人可以搭载各种不同的开鸿传感器,并且配备了深度摄像头。它还可以搭配多种末端配件进行二次开发,并且可以与主流大模型进行对接
以上是乐聚人形机器人'夸父”通过 OpenHarmony 3.2 兼容性验证的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
Vibe编码通过让我们使用自然语言而不是无尽的代码行创建应用程序来重塑软件开发的世界。受Andrej Karpathy等有远见的人的启发,这种创新的方法使Dev
 2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月,Generative AI又是一个改变游戏规则的月份,为我们带来了一些最令人期待的模型升级和开创性的新功能。从Xai的Grok 3和Anthropic的Claude 3.7十四行诗到Openai的G
 如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
Yolo(您只看一次)一直是领先的实时对象检测框架,每次迭代都在以前的版本上改善。最新版本Yolo V12引入了进步,可显着提高准确性
 Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4当前可用并广泛使用,与诸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和产生连贯的响应方面取得了重大改进。未来的发展可能包括更多个性化的间
 Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google DeepMind的Gencast:天气预报的革命性AI 天气预报经历了巨大的转变,从基本观察到复杂的AI驱动预测。 Google DeepMind的Gencast,开创性
 哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
本文讨论了AI模型超过Chatgpt,例如Lamda,Llama和Grok,突出了它们在准确性,理解和行业影响方面的优势。(159个字符)
 最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
本文回顾了AI最高的艺术生成器,讨论了他们的功能,对创意项目的适用性和价值。它重点介绍了Midjourney是专业人士的最佳价值,并建议使用Dall-E 2进行高质量的可定制艺术。
 O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
Openai的O1:为期12天的礼物狂欢始于他们迄今为止最强大的模型 12月的到来带来了全球放缓,世界某些地区的雪花放缓,但Openai才刚刚开始。 山姆·奥特曼(Sam Altman)和他的团队正在推出12天的礼物前
