

Apollo与Carsim/TruckSim合作进行联合仿真

1.背景
仿真在自动驾驶研发中扮演着重要角色,它能够极大地提高研发效率,并为算法的可靠性提供保障。百度Apollo系统作为一款优秀的开源平台,非常适合有意学习自动驾驶的朋友进行研究。此外,Carsim/Trucksim是备受推崇的经典汽车动力学仿真工具。
本文介绍了通过Apollo和Trucksim的联合,实现本地实时仿真的方法。适合初学者搭建仿真平台并研究Apollo系统。
2. 架构设计
Apollo工程的核心代码是用C++实现的。Trucksim的常用接口包括simulink、Python和C语言。本文将首先介绍Apollo、simulink和Trucksim联合仿真的架构,并讨论该仿真系统存在的问题。接下来,将重点讨论Apollo和Trucksim的联合仿真。
2.1 Apollo, simulink和Trucksim方案
Simulink和Apollo可以通过ROS进行通信。由于Apollo的消息数据格式是protobuf,而Simulink的ROS工具只支持标准的ROS消息(ROS msg),因此可以在Apollo中添加一个格式转换的节点来实现兼容。关于Simulink调用Trucksim的方案,网络上有很多资源可供参考,就不再详述了。
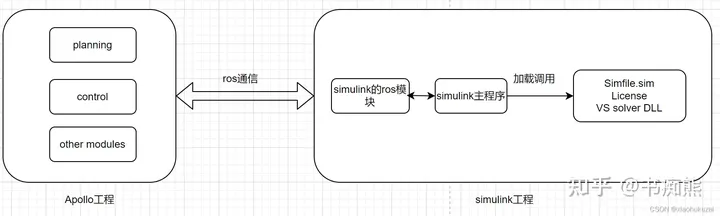
simulink方案图
2.2 Apollo,rosbridge和Trucksim方案
建立QT工程和Apollo工程之间的websocket通信。在Apollo工程中,通过增加rosbridge(或者cyber_bridge)模块实现ros消息(或者cyber消息)与websocket的互转。QT工程作为websocket客户端使用C++实现,并调用Trucksim的动态库,实现实时运行Trucksim的功能。
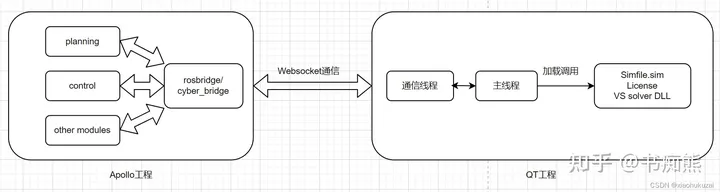
rosbridge方案图
3. 功能实现
3.1 Apollo, simulink和Trucksim方案
3.1.1 Simulink配置
Simulink的工具包中有ROS的支持包,配置ROS网络地址如图2所示。Hostname/IP Address和Port分别为ROS_MASTER_URI的地址和端口号,在上面的通信机制中有说明。
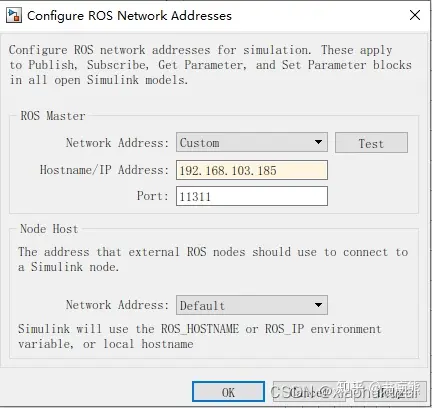
配置ROS网络地址
ROS subscriber接收interface的消息,因此Topic, Message type, Sample time要与interface中程序相对应。

配置ros subcribe
为了便于调试验证,现在MATLAB端启动ROS。配置过程如下:
MATLAB设置的指令:
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')3.1.2 TruckSim配置
配置界面
Trucksim是向导式编程,参数配置界面:卡车选择5A Tractor(SS_SSS),具体参数见图3.控制界面:Models选择simulink。
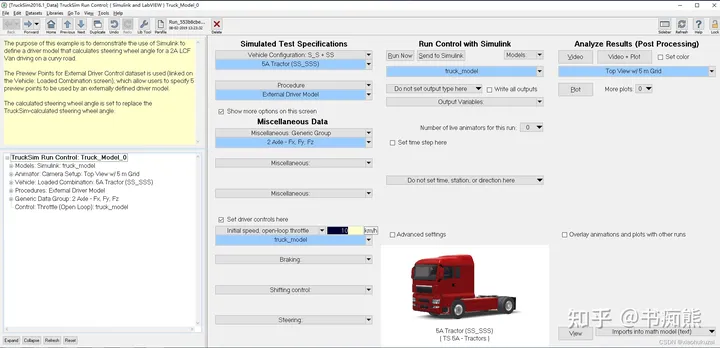
主界面
输入参数配置界面
输出参数配置界面
3.2 Apollo, rosbridge和Trucksim方案
3.2.1 apollo中配置rosbridge
rosbridge安装网上教程较多,本文不再赘述。
使用方法如下:
cd ros_pkgs_ws
catkin_make
启动rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATH
roslaunch rosbridge_server rosbridge_websocket.launch
3.2.1 Qt工程配置说明
3.2.1.1 Qt和CMake版本信息

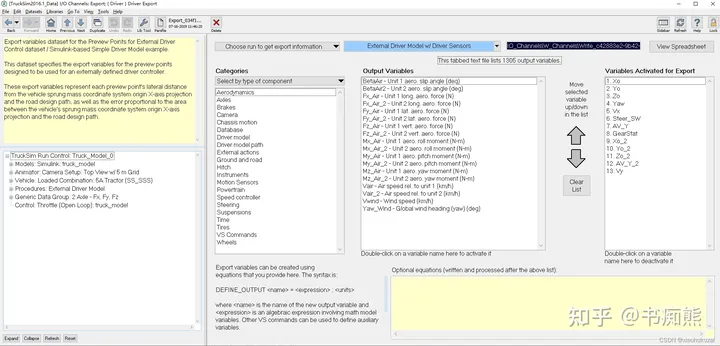
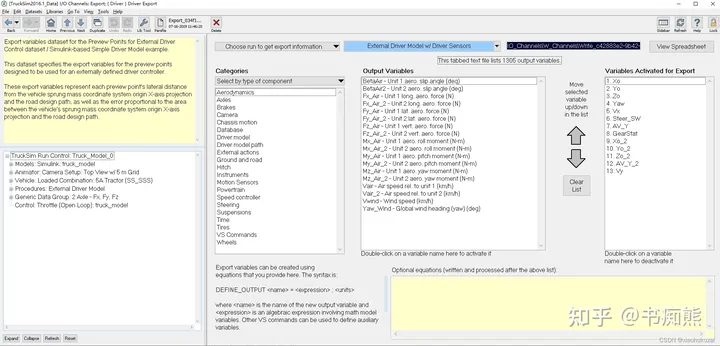
3.2.1.3 Apollo工程和QT工程的接口定义
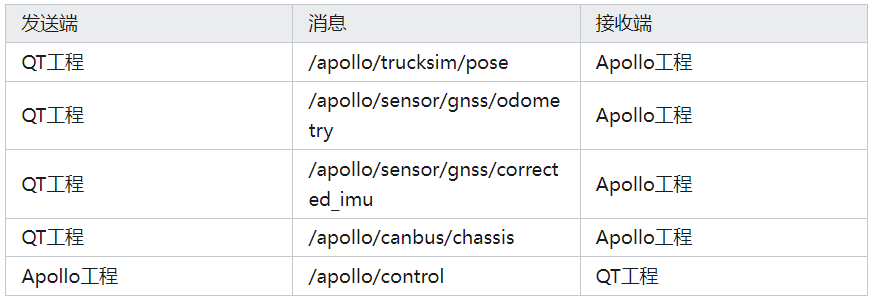
/apollo/trucksim/pose
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
以上是Apollo与Carsim/TruckSim合作进行联合仿真的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 推荐几款买主流币的app软件2025年最新发布
Apr 21, 2025 pm 11:54 PM
推荐几款买主流币的app软件2025年最新发布
Apr 21, 2025 pm 11:54 PM
可以购买主流币的APP软件包括:1. 币安(Binance),全球领先,交易量大,速度快;2. OKX,创新产品,低费用,安全性高;3. Gate.io,多种资产和交易选项,注重安全;4. 火币(HTX),低费用,用户体验好;5. Coinbase,适合新手,安全性高;6. Kraken,安全合规,提供多种服务;7. KuCoin,低费用,适合专业交易者;8. Gemini,强调合规性,提供托管服务;9. Crypto.com,提供多种优惠和服务;10. Bitstamp,老牌交易所,流动性强,
 币圈合约党必备软件推荐
Apr 21, 2025 pm 11:21 PM
币圈合约党必备软件推荐
Apr 21, 2025 pm 11:21 PM
2025年币圈合约交易所平台排名前十的分别是:1. Binance Futures,2. OKX Futures,3. Gate.io,4. Huobi Futures,5. BitMEX,6. Bybit,7. Deribit,8. Bitfinex,9. CoinFLEX,10. Phemex,这些平台因其高流动性、多样化交易功能和严格的安全措施而受到广泛认可。
 币圈杠杆交易所排名 币圈十大杠杆交易所APP最新推荐
Apr 21, 2025 pm 11:24 PM
币圈杠杆交易所排名 币圈十大杠杆交易所APP最新推荐
Apr 21, 2025 pm 11:24 PM
2025年在杠杆交易、安全性和用户体验方面表现突出的平台有:1. OKX,适合高频交易者,提供最高100倍杠杆;2. Binance,适用于全球多币种交易者,提供125倍高杠杆;3. Gate.io,适合衍生品专业玩家,提供100倍杠杆;4. Bitget,适用于新手及社交化交易者,提供最高100倍杠杆;5. Kraken,适合稳健型投资者,提供5倍杠杆;6. Bybit,适用于山寨币探索者,提供20倍杠杆;7. KuCoin,适合低成本交易者,提供10倍杠杆;8. Bitfinex,适合资深玩
 全球比特币期货交易所是哪个?
Apr 21, 2025 pm 11:18 PM
全球比特币期货交易所是哪个?
Apr 21, 2025 pm 11:18 PM
比特币期货交易所排行榜前五名分别是:1. CME Group:全球最值得信赖,吸引机构投资者,合规性强;2. Coinbase:专为散户,提供13种期货合约,易用性高;3. Binance:高杠杆,流动性好,用户量大;4. OKX:累计交易量大,专业界面,风险管理完善;5. Kraken:安全性高,适合欧洲市场和机构客户。
 okx全球站登录入口 欧易okx全球站官方登录首页
Apr 21, 2025 pm 11:57 PM
okx全球站登录入口 欧易okx全球站官方登录首页
Apr 21, 2025 pm 11:57 PM
欧易 OKX 是全球领先的数字资产交易平台。1) 其发展历程包括:2017年上线,2021年启用中文名“欧易”,2022年更名为欧易 OKX。2) 核心服务包括:交易服务(币币、杠杆、合约、DEX、法币交易)和金融服务(余币宝、DeFi挖矿、借贷)。3) 平台特色功能有:行情数据服务和风控体系。4) 核心优势包括:技术实力、安全体系、服务支持和市场覆盖。
 币圈合约交易平台排行榜2025
Apr 21, 2025 pm 11:15 PM
币圈合约交易平台排行榜2025
Apr 21, 2025 pm 11:15 PM
以下是全球十大加密货币期货交易所:1. Binance Futures:提供丰富的合约产品,低费用和高流动性。 2. OKX:支持多种币种交易,采用SSL加密和冷钱包存储。 3. Huobi Futures:以稳定平台和良好服务着称,提供教育资源。 4. Gate.io:创新合约产品和高流动性,但FTX曾破产。 5. Deribit:专注期权和永续合约,提供专业交易工具。 6. CoinFLEX:提供代币化期货合约和治理代币FLEX。 7. Phemex:高达100倍杠杆,低交易费用,提供创新合约。 8. B
 量子链交易所排名top10推荐(2025更新)
Apr 21, 2025 pm 11:48 PM
量子链交易所排名top10推荐(2025更新)
Apr 21, 2025 pm 11:48 PM
量子链可以在以下交易所进行交易:1. 币安(Binance):全球最大交易所之一,交易量大,币种丰富,安全性高。2. 芝麻开门(Gate.io):大型交易所,提供多种数字货币交易,交易深度好。3. 欧易(OKX):由OK集团运营,综合实力强,交易量大,安全措施完善。4. Bitget:发展快,提供量子链交易,安全性提升。5. Bithumb:日本运营,支持多种主流虚拟货币交易,安全可靠。6. 抹茶交易所:知名交易所,界面友好,支持量子链交易。7. 火币(Huobi):大型交易所,提供量子链交易,
 2025全球最佳加密货币交易所:顶级推荐
Apr 21, 2025 pm 10:39 PM
2025全球最佳加密货币交易所:顶级推荐
Apr 21, 2025 pm 10:39 PM
2025年全球最佳加密货币交易所推荐为:1. 币安 (Binance),2. Coinbase,3. 欧易 (OKX),4. Kraken,5. 芝麻开门 (KuCoin),6. Bitget,7. Bybit,8. Gemini,9. Crypto.com,10. MEXC 抹茶交易所,这些交易所在安全性、用户体验、交易费用、币种选择、交易功能、合规性、创新能力和全球覆盖等方面表现优异,适合不同需求的投资者。
