

自动驾驶领域的端到端技术是否会替代Apollo、autoware等框架?

Rethinking the Open-Loop Evaluation of End-to-End Autonomous Driving in nuScenes
- 作者单位:百度
- 作者:共一 Jiang-Tian Zhai, Ze Feng,百度王井东组
- 发表:arXiv
- 论文链接:https://arxiv.org/abs/2305.10430
- 代码链接:https://github.com/E2E-AD/AD-MLP
关键词:端到端自动驾驶,nuScenes 开环评估
1. 摘要
现有的自动驾驶系统通常被分为三个主任务:感知、预测和规划;规划任务涉及到基于内部意图和外部环境来预测自车的运动轨迹,并操纵车辆。大部分现有方案在 nuScenes 数据集上评估他们的方法,评价指标为 L2 error 和碰撞率(collision rate)
本文重新对现有的评价指标做了评估,探索他们是否能够准确地度量不同方法的优越性。本文还设计了一个 MLP-based 方法,将原始 sensor 数据(历史轨迹、速度等)作为输入,直接输出自车的未来轨迹,不使用任何感知和预测信息,例如 camera 图像或者 LiDAR。令人惊讶的是:这样一个简单的方法在 nuScenes 数据集上达到了 SOTA 的 planning 性能,减少了 30% 的 L2 error。我们进一步深入分析,对于 nuScenes 数据集上的规划任务很重要的因子提供了一些新的见解。我们的观察还表明,我们需要重新思考 nuScenes 中端到端自动驾驶的开环评测方案。
2. 论文的目的、贡献及结论
本文希望对 nuScenes 上端到端自动驾驶的开环评测方案做评估;不使用视觉和 Lidar 的情况下,只使用自车状态和高级命令(一共 21 维的向量)作为输入就可以在 nuScenes 上达到 Planning 的 SOTA。作者由此指出了 nuScenes 上开环评测的不可靠性,给出了两个分析:nuScenes 数据集上自车轨迹倾向于直行或者曲率非常小的曲线;碰撞率的检测和网格密度相关,并且数据集的碰撞标注也有噪声,当前评估碰撞率的方法不够鲁棒和准确;
3. 论文的方法
3.1 简介及相关工作简述
现存的自动驾驶模型涉及到多个独立任务,例如感知、预测和规划。这种设计简化了跨团队写作的难度,但也会由于各个任务的优化和训练的独立性,导致整个系统的信息丢失和误差累积。端到端的方法被提出,这类方法从自车和周围环境的时空特征学习中受益。
相关工作:ST-P3[1] 提出一种可解释的基于视觉的端到端系统,将感知、预测和规划的特征学习进行统一。UniAD[2] 对 Planning 任务进行系统化设计,采用基于 query 的设计连接中间多个任务,可以对多个任务的关系进行建模和编码;VAD[3] 以完全向量化的方式对场景进行建模,不需要稠密的特征表示,在计算上更为高效。
本文希望探索现有的评估指标是否能准确地度量不同方法的优劣。本文仅使用了自车在行驶中的的物理状态(现有方法所使用信息的子集)来开展实验,而不是使用相机和激光雷达提供的感知和预测信息。总之,本文的模型没有用视觉或者点云特征的编码器,直接将自车的物理信息编码为一维向量,在 concat 之后送到 MLP 中。训练使用 GT 轨迹进行监督,模型直接预测自车未来一定时间内的轨迹点。follow 之前的工作,在 nuScenes 数据集上使用 L2 Error 和碰撞率(collision rate.)进行评估
虽然模型设计简单,但获得了最好的 Planning 结果,本文将此归因于当前评估指标的不足。事实上,通过使用过去的自车轨迹、速度、加速度和时间连续性,就可以在一定程度上反映出自车在未来的运动
3.2 模型结构
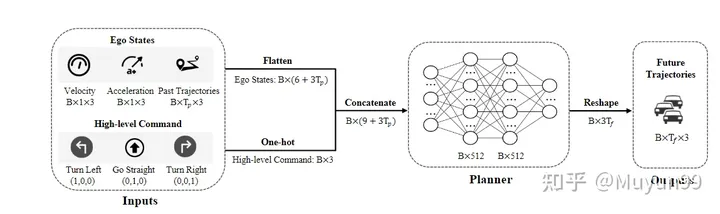
模型结构总览
模型输入包括两部分:自车状态以及代表未来短期运动趋势的高级命令。
自车状态:搜集了自车过去 =4帧的运动轨迹、瞬时速度和加速度

高级命令:由于我们的模型不使用高精地图,所以需要高级命令进行导航。按照常见的作法,定义了三种类型的命令:左转、直行和右转。具体来讲,当自车在未来 3s 中将向左或向右位移大于 2m 时,将相应的命令设置为左转或者右转,否则则是直行。使用维度为 1x3 的 one-hot 编码来表示高级命令
网络结构:网络就是简单的三层 MLP(输入到输出的维度分别为 21-512-512-18),最终输出的帧数=6,每一帧输出自车的轨迹位置(x,y 坐标)以及航向角(heading 角)
损失函数
损失函数:使用 L1 损失函数进行惩罚
4. 论文的实验
4.1 实验设置
数据集:在 nuScenes 数据集上做实验,nuScenes 数据集包括 1K 场景和大约 40K 关键帧,主要收集在波士顿和新加坡,使用配备 LiDAR 和周视摄像头的车辆。为每一帧收集的数据包括多视角 Camear 图像、LiDAR、速度、加速度等。
评测指标:使用 ST-P3 论文的评测代码(https://github.com/OpenPerceptionX/ST-P3/blob/main/stp3/metrics.py)。评估1s、2s和3s时间范围的输出轨迹。为了评估预测的自车轨迹的质量,计算了两个常用的指标:
L2 Error :以米为单位,分别在下一个 1s、2s 和 3s 时间范围内自车的预测轨迹和真实轨迹之间计算平均 L2 误差;
碰撞率(collision rate):以百分比为单位。为了确定自车与其他物体碰撞的频率,通过在预测轨迹上的每个航路点放置一个表示自车的 box ,然后检测与当前场景中车辆和行人的边界框的是否发生了碰撞,以计算碰撞率。
超参数设置及硬件:PaddlePaddle 和 PyTorch 框架,AdamW 优化器(4e-6 lr 及 1e-2 weight decay),cosine scheduler,训了 6 个 epoch,batch size 为 4,用了一张 V100
4.2 实验结果
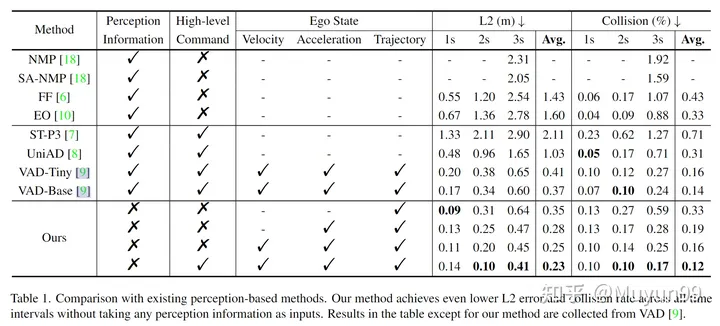
表1 和现有的基于感知的方法进行比较
在表 1 中进行了一些消融实验。以分析速度、加速度、轨迹和 High-level Command 对本文模型性能的影响。令人惊讶的是,仅使用轨迹作为输入,没有感知信息,本文的 Baseline 模型已经实现了比所有现有方法更低的平均 L2 误差。
当我们逐渐向输入添加加速度、速度和 High-level Command 时,平均 L2 误差和碰撞率从 0.35m 降低到 0.23m,将 0.33% 降低到 0.12%。同时将 Ego State 和 High-level Command 作为输入的模型实现了最低的 L2 误差和碰撞率,超过了所有先前最先进的基于感知的方法,如最后一行所示。
4.3 实验分析
文章从两个角度分析了自我车辆状态在nuScenes训练集上的分布:未来3s的轨迹点;航向角(heading / yaw角)和曲率角(curvature angles)
nuScenes 训练集的分布分析。
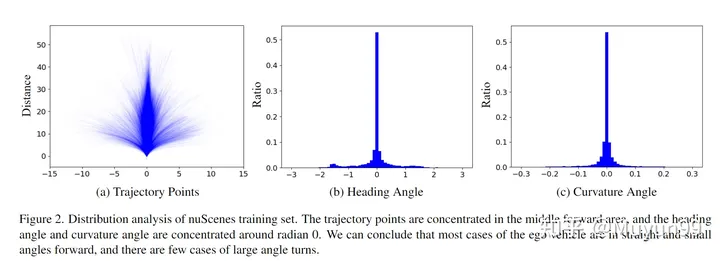
在图 2 (a) 中绘制了训练集中的所有未来 3s 轨迹点。从图中可以看出,轨迹主要集中在中间部分(直),轨迹主要是直线,或曲率非常小的曲线。
航向角表示相对于当前时间的未来行驶方向,而曲率角反映了车辆的转弯速度。如图 2 (b) 和 (c) 所示,近 70% 的航向角和曲率角分别位于 -0.2 到 0.2 和 -0.02 到 0.02 弧度的范围内。这一发现与从轨迹点分布中得出的结论是一致的。
基于上述对轨迹点、航向角和曲率角分布的分析,本文认为在 nuScenes 训练集中,自车倾向于沿直线前进,在短时间范围内行驶时以小角度前进。
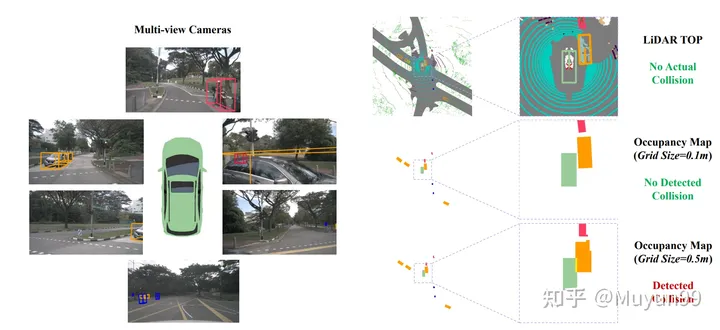
Occupancy map 的不同网格大小引起 GT 轨迹会发生碰撞
在计算碰撞率时,现有方法的常见做法是将车辆和行人等对象投影到鸟瞰图 (BEV) 空间中,然后将它们转换为图中的占用区域。而这就是精度损失之处,我们发现一小部分 GT 轨迹样本(约2%)也与占用网格中的障碍物重叠,但自车在收集数据时实际上不会与其他任何对象发生碰撞,这导致碰撞被错误检测。当 ego 车辆接近某些对象时会导致错误的碰撞,例如小于单个 Occupancy map 像素的尺寸。
图三展示了这种现象的示例,以及两种不同网格大小的地面实况轨迹的碰撞检测结果。橙色是可能被误检为碰撞的车辆,在右下角所示的较小网格尺寸(0.1m)下,评估系统正确地将 GT 轨迹识别为不碰撞,但在右下角较大的网格尺寸(0.5m)下,会出现错误的碰撞检测。
在观察占用网格大小对轨迹碰撞检测的影响后,我们测试了网格大小为0.6m。nuScenes 训练集有 4.8% 的碰撞样本,而验证集有 3.0%。值得一提的是,当我们之前使用 0.5m 的网格大小时,验证集中只有 2.0% 的样本被错误分类为碰撞。这再次证明了当前评估碰撞率的方法不够鲁棒和准确的。
作者总结:本文的主要目的是提出我们的观察结果,而不是提出一个新的模型。尽管我们的模型在 nuScenes 数据集上表现良好,但我们承认它只是一个不切实际的玩具,无法在现实世界中发挥作用。在没有自车状态的情况下驾驶是一项难以克服的挑战。尽管如此,我们希望我们的见解将促进该领域的进一步研究,对端到端自动驾驶的进步能够重新评估。
5. 文章评价
这篇文章是对近期端到端自动驾驶在 nuScenes 数据集上评测的一次正本清源。不论是隐式端到端直接出 Planning 信号,还是显式端到端有中间环节的输出,很多都是在 nuScenes 数据集上评测的 Planning 指标,而 Baidu 这篇文章指出这种评测并不靠谱。这种文章其实还蛮有意思,发出来其实是打了很多同行的脸,但是也是在积极地推动行业往前走,或许端到端不用做到 Planning(感知预测端到端即可),或许大家在评估性能的时候多做一些闭环测试(CARLA 模拟器等),能够更好地推动自动驾驶社区的进步,能够把论文落到实车上。自动驾驶这条路,还是任重而道远~
参考
- ^ST-P3: End-to-end Vision-based Autonomous Driving via Spatial-Temporal Feature Learning
- ^Planning-oriented Autonomous Driving
- ^VAD: Vectorized Scene Representation for Efficient Autonomous Driving

原文链接:https://mp.weixin.qq.com/s/skNDMk4B1rtvJ_o2CM9f8w
以上是自动驾驶领域的端到端技术是否会替代Apollo、autoware等框架?的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
我尝试了使用光标AI编码的Vibe编码,这太神奇了!
Mar 20, 2025 pm 03:34 PM
Vibe编码通过让我们使用自然语言而不是无尽的代码行创建应用程序来重塑软件开发的世界。受Andrej Karpathy等有远见的人的启发,这种创新的方法使Dev
 2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月的Genai推出前5名:GPT-4.5,Grok-3等!
Mar 22, 2025 am 10:58 AM
2025年2月,Generative AI又是一个改变游戏规则的月份,为我们带来了一些最令人期待的模型升级和开创性的新功能。从Xai的Grok 3和Anthropic的Claude 3.7十四行诗到Openai的G
 如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
如何使用Yolo V12进行对象检测?
Mar 22, 2025 am 11:07 AM
Yolo(您只看一次)一直是领先的实时对象检测框架,每次迭代都在以前的版本上改善。最新版本Yolo V12引入了进步,可显着提高准确性
 Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4 o可用吗?
Mar 28, 2025 pm 05:29 PM
Chatgpt 4当前可用并广泛使用,与诸如ChatGpt 3.5(例如ChatGpt 3.5)相比,在理解上下文和产生连贯的响应方面取得了重大改进。未来的发展可能包括更多个性化的间
 Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google的Gencast:Gencast Mini Demo的天气预报
Mar 16, 2025 pm 01:46 PM
Google DeepMind的Gencast:天气预报的革命性AI 天气预报经历了巨大的转变,从基本观察到复杂的AI驱动预测。 Google DeepMind的Gencast,开创性
 哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
哪个AI比Chatgpt更好?
Mar 18, 2025 pm 06:05 PM
本文讨论了AI模型超过Chatgpt,例如Lamda,Llama和Grok,突出了它们在准确性,理解和行业影响方面的优势。(159个字符)
 最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
最佳AI艺术生成器(免费付款)创意项目
Apr 02, 2025 pm 06:10 PM
本文回顾了AI最高的艺术生成器,讨论了他们的功能,对创意项目的适用性和价值。它重点介绍了Midjourney是专业人士的最佳价值,并建议使用Dall-E 2进行高质量的可定制艺术。
 O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
O1 vs GPT-4O:OpenAI的新型号比GPT-4O好吗?
Mar 16, 2025 am 11:47 AM
Openai的O1:为期12天的礼物狂欢始于他们迄今为止最强大的模型 12月的到来带来了全球放缓,世界某些地区的雪花放缓,但Openai才刚刚开始。 山姆·奥特曼(Sam Altman)和他的团队正在推出12天的礼物前
