

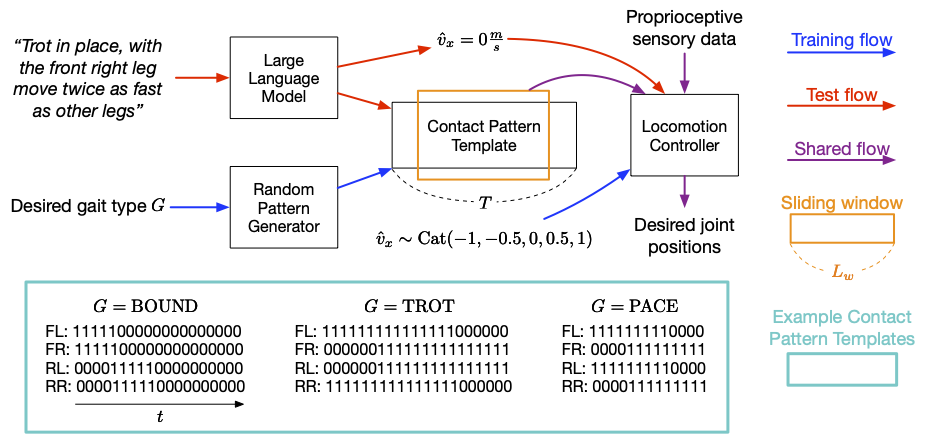
谷歌用大型模型训练机器狗理解模糊指令,激动不已准备去野餐

论文地址:https://arxiv.org/abs/2306.07580 项目网站:https://saytap.github.io/
以上是谷歌用大型模型训练机器狗理解模糊指令,激动不已准备去野餐的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



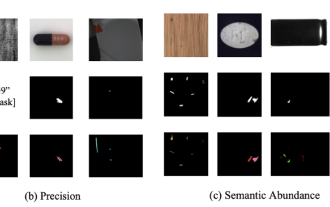 突破传统缺陷检测的界限,\'Defect Spectrum\'首次实现超高精度丰富语义的工业缺陷检测。
Jul 26, 2024 pm 05:38 PM
突破传统缺陷检测的界限,\'Defect Spectrum\'首次实现超高精度丰富语义的工业缺陷检测。
Jul 26, 2024 pm 05:38 PM
在现代制造业中,精准的缺陷检测不仅是保证产品质量的关键,更是提升生产效率的核心。然而,现有的缺陷检测数据集常常缺乏实际应用所需的精确度和语义丰富性,导致模型无法识别具体的缺陷类别或位置。为了解决这一难题,由香港科技大学广州和思谋科技组成的顶尖研究团队,创新性地开发出了“DefectSpectrum”数据集,为工业缺陷提供了详尽、语义丰富的大规模标注。如表一所示,相比其他工业数据集,“DefectSpectrum”数据集提供了最多的缺陷标注(5438张缺陷样本),最细致的缺陷分类(125种缺陷类别
 英伟达对话模型ChatQA进化到2.0版本,上下文长度提到128K
Jul 26, 2024 am 08:40 AM
英伟达对话模型ChatQA进化到2.0版本,上下文长度提到128K
Jul 26, 2024 am 08:40 AM
开放LLM社区正是百花齐放、竞相争鸣的时代,你能看到Llama-3-70B-Instruct、QWen2-72B-Instruct、Nemotron-4-340B-Instruct、Mixtral-8x22BInstruct-v0.1等许多表现优良的模型。但是,相比于以GPT-4-Turbo为代表的专有大模型,开放模型在很多领域依然还有明显差距。在通用模型之外,也有一些专精关键领域的开放模型已被开发出来,比如用于编程和数学的DeepSeek-Coder-V2、用于视觉-语言任务的InternVL
 数百万晶体数据训练,解决晶体学相位问题,深度学习方法PhAI登Science
Aug 08, 2024 pm 09:22 PM
数百万晶体数据训练,解决晶体学相位问题,深度学习方法PhAI登Science
Aug 08, 2024 pm 09:22 PM
编辑|KX时至今日,晶体学所测定的结构细节和精度,从简单的金属到大型膜蛋白,是任何其他方法都无法比拟的。然而,最大的挑战——所谓的相位问题,仍然是从实验确定的振幅中检索相位信息。丹麦哥本哈根大学研究人员,开发了一种解决晶体相问题的深度学习方法PhAI,利用数百万人工晶体结构及其相应的合成衍射数据训练的深度学习神经网络,可以生成准确的电子密度图。研究表明,这种基于深度学习的从头算结构解决方案方法,可以以仅2埃的分辨率解决相位问题,该分辨率仅相当于原子分辨率可用数据的10%到20%,而传统的从头算方
 谷歌AI拿下IMO奥数银牌,数学推理模型AlphaProof面世,强化学习 is so back
Jul 26, 2024 pm 02:40 PM
谷歌AI拿下IMO奥数银牌,数学推理模型AlphaProof面世,强化学习 is so back
Jul 26, 2024 pm 02:40 PM
对于AI来说,奥数不再是问题了。本周四,谷歌DeepMind的人工智能完成了一项壮举:用AI做出了今年国际数学奥林匹克竞赛IMO的真题,并且距拿金牌仅一步之遥。上周刚刚结束的IMO竞赛共有六道赛题,涉及代数、组合学、几何和数论。谷歌提出的混合AI系统做对了四道,获得28分,达到了银牌水平。本月初,UCLA终身教授陶哲轩刚刚宣传了百万美元奖金的AI数学奥林匹克竞赛(AIMO进步奖),没想到7月还没过,AI的做题水平就进步到了这种水平。IMO上同步做题,做对了最难题IMO是历史最悠久、规模最大、最负
 PRO | 为什么基于 MoE 的大模型更值得关注?
Aug 07, 2024 pm 07:08 PM
PRO | 为什么基于 MoE 的大模型更值得关注?
Aug 07, 2024 pm 07:08 PM
2023年,几乎AI的每个领域都在以前所未有的速度进化,同时,AI也在不断地推动着具身智能、自动驾驶等关键赛道的技术边界。多模态趋势下,Transformer作为AI大模型主流架构的局面是否会撼动?为何探索基于MoE(专家混合)架构的大模型成为业内新趋势?大型视觉模型(LVM)能否成为通用视觉的新突破?...我们从过去的半年发布的2023年本站PRO会员通讯中,挑选了10份针对以上领域技术趋势、产业变革进行深入剖析的专题解读,助您在新的一年里为大展宏图做好准备。本篇解读来自2023年Week50
 为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
为大模型提供全新科学复杂问答基准与测评体系,UNSW、阿贡、芝加哥大学等多家机构联合推出SciQAG框架
Jul 25, 2024 am 06:42 AM
编辑|ScienceAI问答(QA)数据集在推动自然语言处理(NLP)研究发挥着至关重要的作用。高质量QA数据集不仅可以用于微调模型,也可以有效评估大语言模型(LLM)的能力,尤其是针对科学知识的理解和推理能力。尽管当前已有许多科学QA数据集,涵盖了医学、化学、生物等领域,但这些数据集仍存在一些不足。其一,数据形式较为单一,大多数为多项选择题(multiple-choicequestions),它们易于进行评估,但限制了模型的答案选择范围,无法充分测试模型的科学问题解答能力。相比之下,开放式问答
 准确率达60.8%,浙大基于Transformer的化学逆合成预测模型,登Nature子刊
Aug 06, 2024 pm 07:34 PM
准确率达60.8%,浙大基于Transformer的化学逆合成预测模型,登Nature子刊
Aug 06, 2024 pm 07:34 PM
编辑|KX逆合成是药物发现和有机合成中的一项关键任务,AI越来越多地用于加快这一过程。现有AI方法性能不尽人意,多样性有限。在实践中,化学反应通常会引起局部分子变化,反应物和产物之间存在很大重叠。受此启发,浙江大学侯廷军团队提出将单步逆合成预测重新定义为分子串编辑任务,迭代细化目标分子串以生成前体化合物。并提出了基于编辑的逆合成模型EditRetro,该模型可以实现高质量和多样化的预测。大量实验表明,模型在标准基准数据集USPTO-50 K上取得了出色的性能,top-1准确率达到60.8%。
 Nature观点,人工智能在医学中的测试一片混乱,应该怎么做?
Aug 22, 2024 pm 04:37 PM
Nature观点,人工智能在医学中的测试一片混乱,应该怎么做?
Aug 22, 2024 pm 04:37 PM
编辑|ScienceAI基于有限的临床数据,数百种医疗算法已被批准。科学家们正在讨论由谁来测试这些工具,以及如何最好地进行测试。DevinSingh在急诊室目睹了一名儿科患者因长时间等待救治而心脏骤停,这促使他探索AI在缩短等待时间中的应用。Singh利用了SickKids急诊室的分诊数据,与同事们建立了一系列AI模型,用于提供潜在诊断和推荐测试。一项研究表明,这些模型可以加快22.3%的就诊速度,将每位需要进行医学检查的患者的结果处理速度加快近3小时。然而,人工智能算法在研究中的成功只是验证此
