

更新版 Point Transformer:更高效、更快速、更强大!

原标题:Point Transformer V3: Simpler, Faster, Stronger
论文链接:https://arxiv.org/pdf/2312.10035.pdf
代码链接:https://github.com/Pointcept/PointTransformerV3
作者单位:HKU SH AI Lab MPI PKU MIT
论文思路:
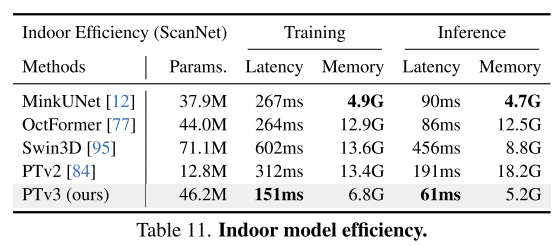
本文无意在注意力机制内寻求创新。相反,它侧重于利用规模(scale)的力量,克服点云处理背景下准确性和效率之间现有的权衡。从 3D 大规模表示学习的最新进展中汲取灵感,本文认识到模型性能更多地受到规模的影响,而不是复杂的设计。因此,本文提出了 Point Transformer V3 (PTv3),它优先考虑简单性和效率,而不是某些机制的准确性,这些机制对 scaling 后的整体性能影响较小,例如用以特定模式组织的点云的高效序列化邻域映射来替换 KNN 的精确邻域搜索。这一原理实现了显着的 scaling,将感受野从 16 点扩展到 1024 点,同时保持高效(与前身 PTv2 相比,处理速度提高了 3 倍,内存效率提高了 10 倍)。PTv3 在涵盖室内和室外场景的 20 多个下游任务中取得了最先进的结果。通过多数据集联合训练的进一步增强,PTv3 将这些结果推向了更高的水平。
网络设计:
3D 表示学习的最新进展 [85] 通过引入跨多个 3D 数据集的协同训练方法,在克服点云处理中的数据规模限制方面取得了进展。与该策略相结合,高效的卷积 backbone [12] 有效地弥补了通常与 point cloud transformers [38, 84] 相关的精度差距。然而,由于与稀疏卷积相比,point cloud transformers 的效率存在差距,因此 point cloud transformers 本身尚未完全受益于这种规模优势。这一发现塑造了本文工作的最初动机:用 scaling principle 的视角重新权衡 point transformers 的设计选择。本文认为模型性能受规模的影响比受复杂设计的影响更显着。
因此,本文引入了 Point Transformer V3 (PTv3),它优先考虑简单性和效率,而不是某些机制的准确性,从而实现 scalability 。这样的调整对 scaling 后的整体性能影响可以忽略不计。具体来说,PTv3 进行了以下调整以实现卓越的效率和 scalability :
- 受到最近两项进展 [48, 77] 的启发,并认识到结构化非结构化点云的 scalability 优势,PTv3 改变了由 K-Nearest Neighbors (KNN) query 定义的传统空间邻近性,占 forward time 的 28%。相反,它探索了点云中根据特定模式组织的序列化邻域的潜力。
- PTv3 采用专为序列化点云量身定制的简化方法,取代了更复杂的注意力 patch 交互机制,例如 shift-window(阻碍注意力算子的融合)和邻域机制(导致高内存消耗)。
- PTv3 消除了对占 forward time 26% 的相对位置编码的依赖,有利于更简单的前置稀疏卷积层。
本文认为这些设计是由现有 point cloud transformers 的 scaling principles 和进步驱动的直观选择。重要的是,本文强调了认识 scalability 如何影响 backbone 设计的至关重要性,而不是详细的模块设计。
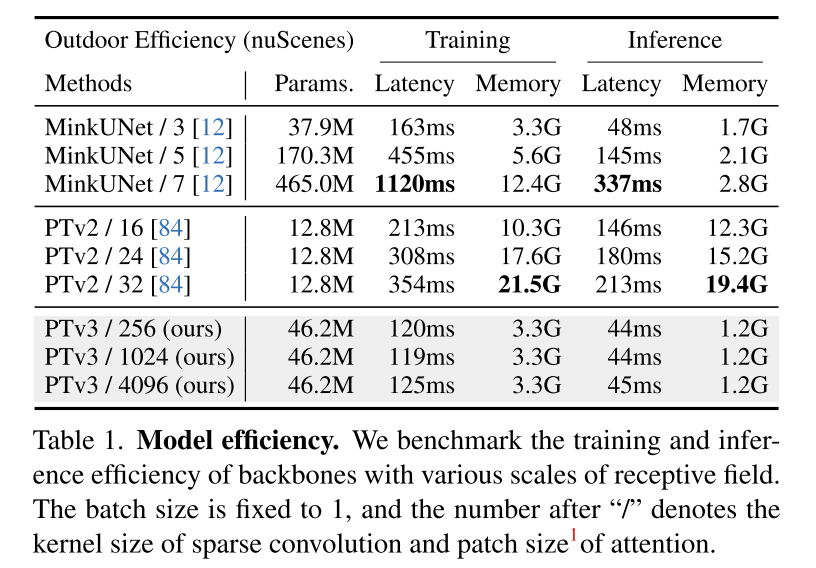
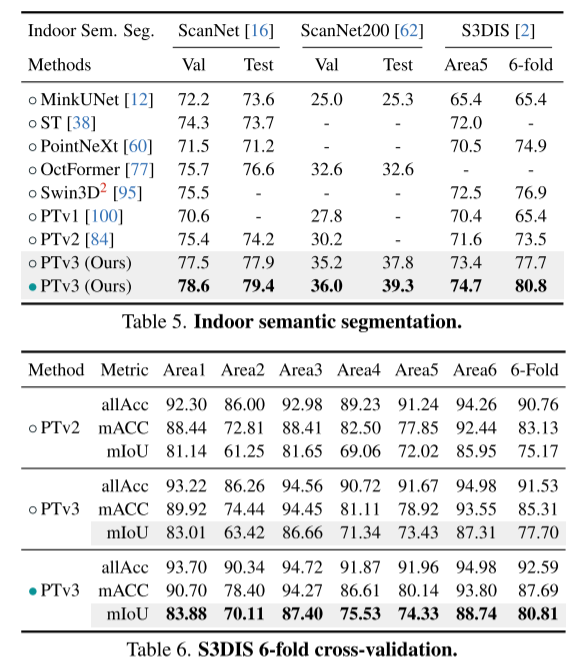
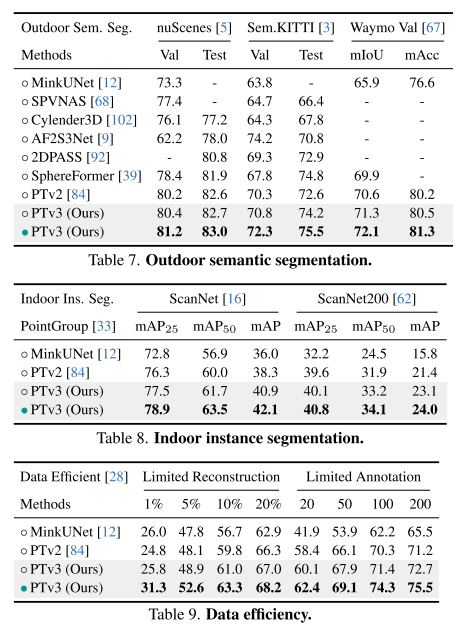
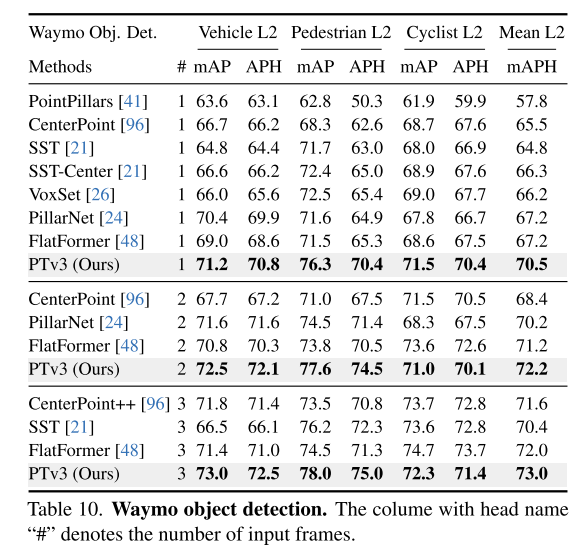
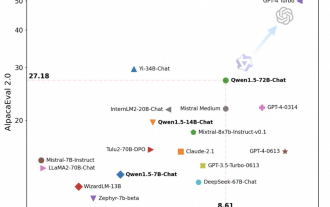
这一原则显着增强了 scalability ,克服了准确性和效率之间的传统权衡(见图 1)。与前身相比,PTv3 的推理速度提高了 3.3 倍,内存使用量降低了 10.2 倍。更重要的是,PTv3 利用其固有的 scale 感知范围的能力,将其感受野从 16 点扩展到 1024 点,同时保持效率。这种 scalability 支撑了其在现实世界感知任务中的卓越性能,其中 PTv3 在室内和室外场景中的 20 多个下游任务中取得了最先进的结果。PTv3 通过多数据集训练进一步扩大其数据规模 [85],进一步提升了这些结果。本文希望本文的见解能够激发未来这一方向的研究。
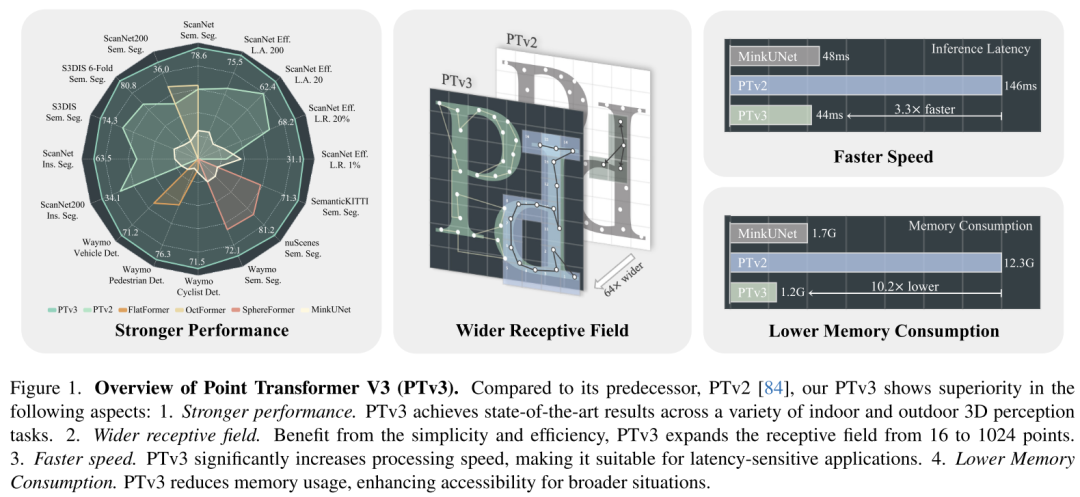
图 1.Point Transformer V3 (PTv3) 概述。与其前身PTv2[84]相比,本文的PTv3在以下方面表现出优越性:1.性能更强。PTv3 在各种室内和室外 3D 感知任务中均取得了最先进的结果。2.更宽的感受野。受益于简单性和效率,PTv3 将感受野从 16 点扩展到 1024 点。3、速度更快。PTv3 显着提高了处理速度,使其适合对延迟敏感的应用程序。4. 降低内存消耗。PTv3 减少了内存使用量,增强了更广泛情况下的可访问性。
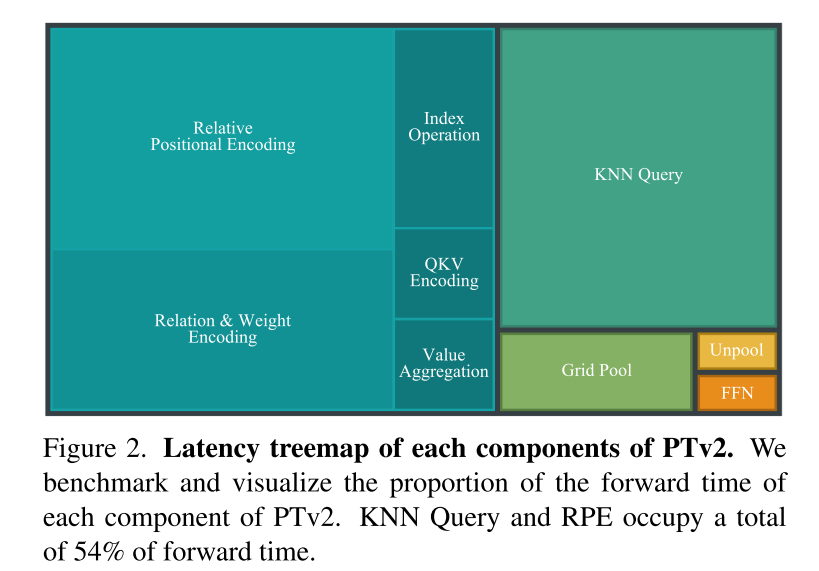
图 2. PTv2 各组件的延迟树形图。本文对 PTv2 的每个组件的 forward time 比例进行基准测试和可视化。KNN Query 和 RPE 总共占用了 54% 的 forward time 。
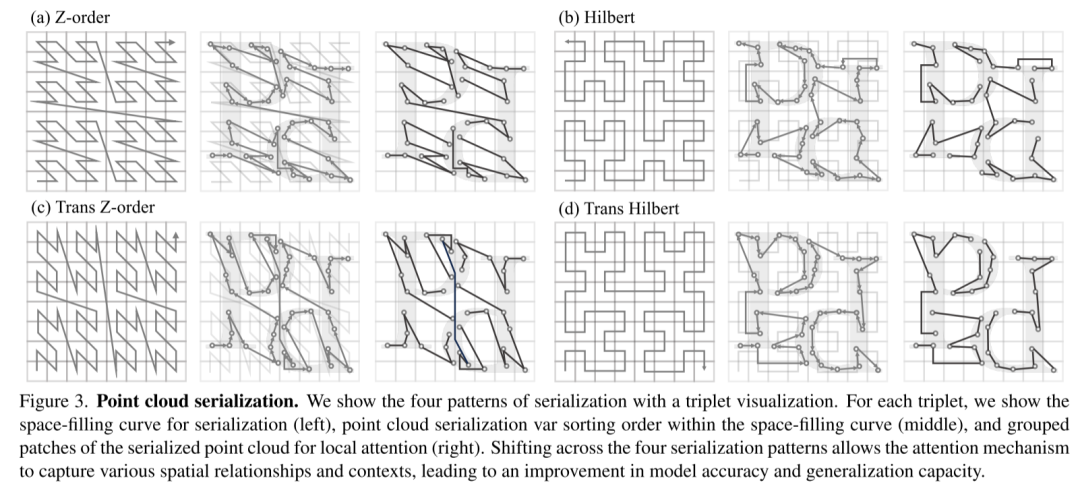
图 3.点云序列化。本文通过三元组可视化展示了四种序列化模式。对于每个三元组,显示了用于序列化的空间填充曲线(左)、空间填充曲线内的点云序列化变量排序顺序(中)以及用于局部注意力的序列化点云的 grouped patches(右)。四种序列化模式的转换允许注意力机制捕获各种空间关系和上下文,从而提高模型准确性和泛化能力。
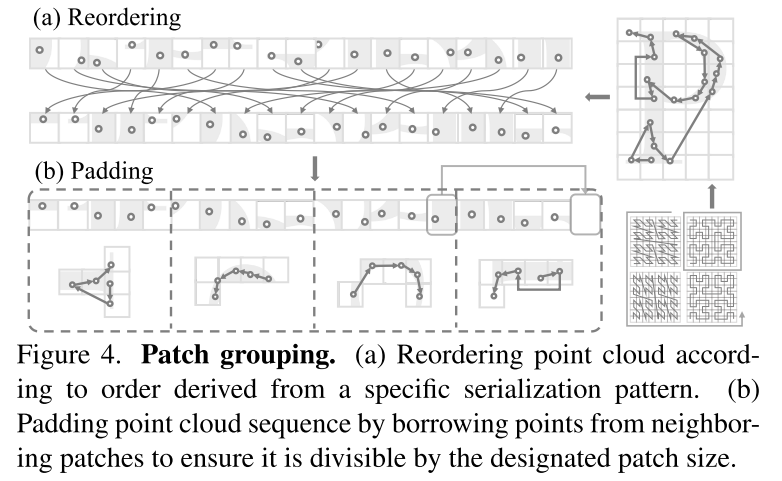
图 4. Patch grouping。(a) 根据从特定序列化模式导出的顺序对点云进行重新排序。(b) 通过借用相邻 patches 的点来填充点云序列,以确保它可以被指定的 patch size 整除。
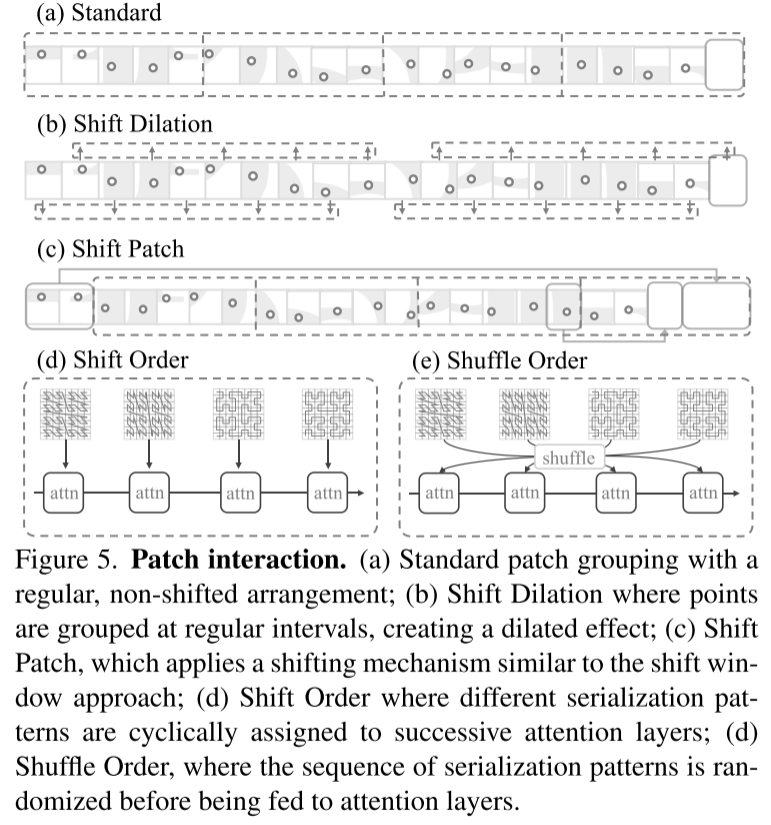
图 5. Patch interaction。(a) Standard patch grouping,具有规则的、非移位的排列;(b) 平移扩张,其中点按规则间隔聚合,产生扩张效果;(c) Shift Patch,采用类似于 shift window 方法的移位机制;(d) Shift Order,其中不同的序列化模式被循环分配给连续的注意力层;(d) Shuffle Order,序列化模式的序列在输入到注意层之前被随机化。
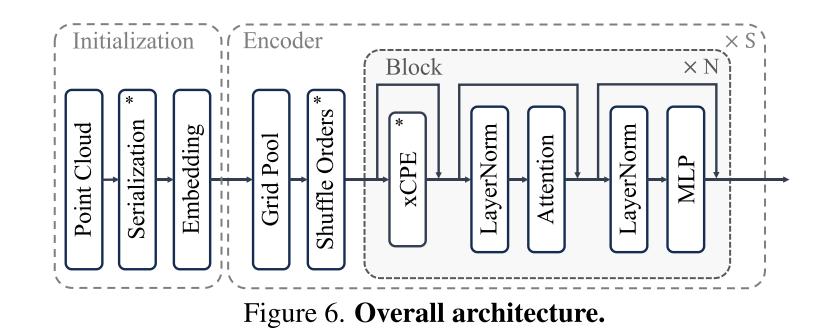
图 6. 整体架构。
实验结果:
总结:
本文介绍了 Point Transformer V3,它朝着克服点云处理中准确性和效率之间的传统权衡迈出了一大步。在对 backbone 设计中 scaling principle 的新颖解释的指导下,本文认为模型性能受规模的影响比受复杂设计的影响更深刻。通过优先考虑效率而不是影响较小的机制的准确性,本文利用规模的力量,从而提高性能。简而言之,通过使模型更简单、更快,本文可以使其变得更强大。
引用:
Wu, X., Jiang, L., Wang, P., Liu, Z., Liu, X., Qiao, Y., Ouyang, W., He, T., & Zhao, H. (2023). Point Transformer V3: Simpler, Faster, Stronger. ArXiv. /abs/2312.10035

原文链接:https://mp.weixin.qq.com/s/u_kN8bCHO96x9FfS4HQGiA
以上是更新版 Point Transformer:更高效、更快速、更强大!的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 开源!超越ZoeDepth! DepthFM:快速且精确的单目深度估计!
Apr 03, 2024 pm 12:04 PM
开源!超越ZoeDepth! DepthFM:快速且精确的单目深度估计!
Apr 03, 2024 pm 12:04 PM
0.这篇文章干了啥?提出了DepthFM:一个多功能且快速的最先进的生成式单目深度估计模型。除了传统的深度估计任务外,DepthFM还展示了在深度修复等下游任务中的最先进能力。DepthFM效率高,可以在少数推理步骤内合成深度图。下面一起来阅读一下这项工作~1.论文信息标题:DepthFM:FastMonocularDepthEstimationwithFlowMatching作者:MingGui,JohannesS.Fischer,UlrichPrestel,PingchuanMa,Dmytr
 通义千问再开源,Qwen1.5带来六种体量模型,性能超越GPT3.5
Feb 07, 2024 pm 10:15 PM
通义千问再开源,Qwen1.5带来六种体量模型,性能超越GPT3.5
Feb 07, 2024 pm 10:15 PM
赶在春节前,通义千问大模型(Qwen)的1.5版上线了。今天上午,新版本的消息引发了AI社区关注。新版大模型包括六个型号尺寸:0.5B、1.8B、4B、7B、14B和72B。其中,最强版本的性能超越了GPT3.5和Mistral-Medium。该版本包含Base模型和Chat模型,并提供多语言支持。阿里通义千问团队表示,相关技术也已经上线到了通义千问官网和通义千问App。除此以外,今天Qwen1.5的发布还有如下一些重点:支持32K上下文长度;开放了Base+Chat模型的checkpoint;
 抛弃编码器-解码器架构,用扩散模型做边缘检测效果更好,国防科大提出DiffusionEdge
Feb 07, 2024 pm 10:12 PM
抛弃编码器-解码器架构,用扩散模型做边缘检测效果更好,国防科大提出DiffusionEdge
Feb 07, 2024 pm 10:12 PM
当前的深度边缘检测网络通常采用编码器-解码器架构,其中包含上下采样模块,以更好地提取多层次的特征。然而,这种结构限制了网络输出准确且细致的边缘检测结果。针对这一问题,一篇AAAI2024上的论文给出了新的解决方案。论文题目:DiffusionEdge:DiffusionProbabilisticModelforCrispEdgeDetection作者:叶云帆(国防科技大学),徐凯(国防科技大学),黄雨行(国防科技大学),易任娇(国防科技大学),蔡志平(国防科技大学)论文链接:https://ar
 大模型也能切片,微软SliceGPT让LLAMA-2计算效率大增
Jan 31, 2024 am 11:39 AM
大模型也能切片,微软SliceGPT让LLAMA-2计算效率大增
Jan 31, 2024 am 11:39 AM
大型语言模型(LLM)通常拥有数十亿参数,经过数万亿token的数据训练。然而,这样的模型训练和部署成本都非常昂贵。为了降低计算需求,人们常常采用各种模型压缩技术。这些模型压缩技术一般可以分为四类:蒸馏、张量分解(包括低秩因式分解)、剪枝和量化。剪枝方法已经存在一段时间,但许多方法需要在剪枝后进行恢复微调(RFT)以保持性能,这使得整个过程成本高且难以扩展。苏黎世联邦理工学院和微软的研究者提出了一个解决此问题的方法,名为SliceGPT。该方法的核心思想是通过删除权重矩阵中的行和列来降低网络的嵌
 你好,电动Atlas!波士顿动力机器人复活,180度诡异动作吓坏马斯克
Apr 18, 2024 pm 07:58 PM
你好,电动Atlas!波士顿动力机器人复活,180度诡异动作吓坏马斯克
Apr 18, 2024 pm 07:58 PM
波士顿动力Atlas,正式进入电动机器人时代!昨天,液压Atlas刚刚「含泪」退出历史舞台,今天波士顿动力就宣布:电动Atlas上岗。看来,在商用人形机器人领域,波士顿动力是下定决心要和特斯拉硬刚一把了。新视频放出后,短短十几小时内,就已经有一百多万观看。旧人离去,新角色登场,这是历史的必然。毫无疑问,今年是人形机器人的爆发年。网友锐评:机器人的进步,让今年看起来像人类的开幕式动作、自由度远超人类,但这真不是恐怖片?视频一开始,Atlas平静地躺在地上,看起来应该是仰面朝天。接下来,让人惊掉下巴
 更新版 Point Transformer:更高效、更快速、更强大!
Jan 17, 2024 am 08:27 AM
更新版 Point Transformer:更高效、更快速、更强大!
Jan 17, 2024 am 08:27 AM
原标题:PointTransformerV3:Simpler,Faster,Stronger论文链接:https://arxiv.org/pdf/2312.10035.pdf代码链接:https://github.com/Pointcept/PointTransformerV3作者单位:HKUSHAILabMPIPKUMIT论文思路:本文无意在注意力机制内寻求创新。相反,它侧重于利用规模(scale)的力量,克服点云处理背景下准确性和效率之间现有的权衡。从3D大规模表示学习的最新进展中汲取灵感,
 超级智能体生命力觉醒!可自我更新的AI来了,妈妈再也不用担心数据瓶颈难题
Apr 29, 2024 pm 06:55 PM
超级智能体生命力觉醒!可自我更新的AI来了,妈妈再也不用担心数据瓶颈难题
Apr 29, 2024 pm 06:55 PM
哭死啊,全球狂炼大模型,一互联网的数据不够用,根本不够用。训练模型搞得跟《饥饿游戏》似的,全球AI研究者,都在苦恼怎么才能喂饱这群数据大胃王。尤其在多模态任务中,这一问题尤为突出。一筹莫展之际,来自人大系的初创团队,用自家的新模型,率先在国内把“模型生成数据自己喂自己”变成了现实。而且还是理解侧和生成侧双管齐下,两侧都能生成高质量、多模态的新数据,对模型本身进行数据反哺。模型是啥?中关村论坛上刚刚露面的多模态大模型Awaker1.0。团队是谁?智子引擎。由人大高瓴人工智能学院博士生高一钊创立,高
 快手版Sora「可灵」开放测试:生成超120s视频,更懂物理,复杂运动也能精准建模
Jun 11, 2024 am 09:51 AM
快手版Sora「可灵」开放测试:生成超120s视频,更懂物理,复杂运动也能精准建模
Jun 11, 2024 am 09:51 AM
什么?疯狂动物城被国产AI搬进现实了?与视频一同曝光的,是一款名为「可灵」全新国产视频生成大模型。Sora利用了相似的技术路线,结合多项自研技术创新,生产的视频不仅运动幅度大且合理,还能模拟物理世界特性,具备强大的概念组合能力和想象力。数据上看,可灵支持生成长达2分钟的30fps的超长视频,分辨率高达1080p,且支持多种宽高比。另外再划个重点,可灵不是实验室放出的Demo或者视频结果演示,而是短视频领域头部玩家快手推出的产品级应用。而且主打一个务实,不开空头支票、发布即上线,可灵大模型已在快影
