

『拯救』开放异构场景 | HEAL:最新可扩展协作感知框架

协同感知技术在解决自动驾驶车辆感知问题方面具有重要意义。然而,现有研究往往忽视了智能体之间可能存在的异构性,即传感器和感知模型的多样性。实际应用中,智能体之间的模态和模型可能会存在显着的差异,这导致了域差异的出现,使得协同感知变得困难。因此,未来的研究需要考虑如何有效地处理智能体之间的异构性,以实现更加有效的协作感知。这将需要开发新的方法和算法,以适应不同智能体之间的差异性,并确保它们能够协同工作,实现更高效的自动驾驶系统。
为了解决这一实际挑战,ICLR 2024的最新研究文章《An Extensible Framework for Open Heterogeneous Collaborative Perception》定义了开放异构协作感知问题(Open Heterogeneous Collaborative Perception):如何将不断出现的新异构智能体类型加入已有协作感知系统,同时确保高感知性能和低加入成本?来自上海交通大学、南加州大学和上海人工智能实验室的研究者们在本文中提出了HEAL(HEterogeneous ALliance):一种可扩展的异构智能体协作框架,有效解决了开放异构协作感知问题的两大痛点。
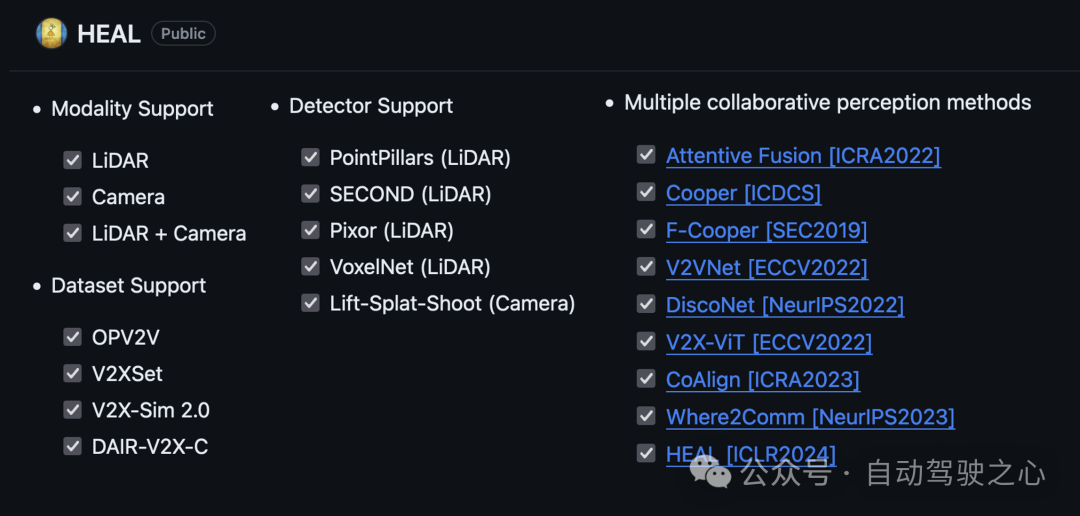
他们创建了一个包含多个协作感知数据集、多个协作感知算法以及支持多模态的代码框架,目前已完全开源。作者认为这是目前最完善的协作感知代码框架,有望帮助更多人轻松进入多模态、异构的协作感知研究领域。
- 论文链接:https://arxiv.org/abs/2401.13964
- 代码链接:https://github.com/yifanlu0227/HEAL
研究背景和意义
近年来,自动驾驶技术备受学术界和工业界关注。然而,实际道路条件复杂多变,而单一车辆的传感器可能会受到其他车辆的遮挡,给自动驾驶系统的感知能力带来挑战。为了解决这些问题,多智能体之间的协作感知成为一种解决方案。随着通信技术的进步,智能体之间可以共享感知信息,结合自身传感器数据和其他智能体的信息,从而提高对周围环境的感知能力。通过协作,每个智能体能够获取自身视野之外的信息,这有助于提升感知和决策能力。

图1. 视线遮挡造成的“鬼探头”问题,单车感知受限
在当前研究领域中,大部分工作都基于一个可能过于简化的假设:所有智能体必须具有相同的结构;也就是说,它们的感知系统都使用相同的传感器,并且共享相同的检测模型。然而,在现实世界中,不同智能体的模式和模型可能是不同的,而且新的模式和模型可能会不断涌现。由于传感器技术和算法的快速发展,最初就确定所有协作智能体的种类(包括模式和模型)是不现实的。当一个从未出现在训练集中的异构智能体希望加入协作时,它必然会遇到与现有智能体之间的领域差异。这种差异会限制其与现有智能体进行特征融合的能力,从而显着限制了协作感知的可扩展性。
因此,开放异构协作感知问题随之而生:如何将不断出现的新智能体类型加入到现有的协作感知系统,同时确保高感知性能和低集成成本?
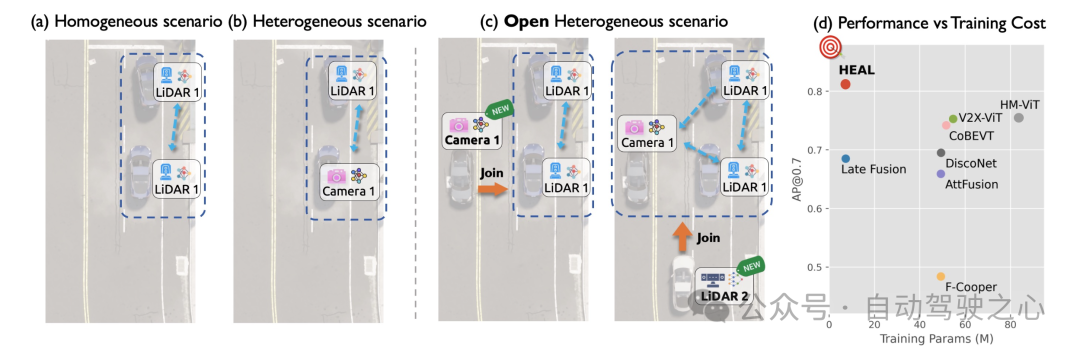
图2. (a) 同构协作感知(b) 异构协作感知(c) 考虑新异构智能体加入的开放异构协作感知(d) HEAL在使用最少训练成本的同时达到了最佳的协作感知性能
为了解决这个问题,一个可行的解决方案是后融合。通过融合每个智能体的感知输出(如3D包围框),后融合绕过了新智能体和现有智能体之间的异构性,且训练只需要发生在单智能体类别上。然而,后融合的性能并不理想,并被证明特别容易受到定位噪声和通信延迟等干扰因素等影响。另一种潜在的方法是完全集体培训,它汇总了协作中的所有智能体类型进行协作训练,以克服领域差异。然而,每次引入新的智能体类型时,这种方法都需要重新训练所有模型。随着新异构智能体的不断出现,训练的代价急剧上升。HEAL提出了一个全新的开放异构协作框架,同时具有完全集体训练的高性能和后融合的低训练成本。
问题定义
开放异构协作感知问题考虑如下场景:将具有先前未出现的模态或者模型的异构智能体类别加入到已有的协作系统中。不失一般性的,我们考虑场景初始由个同构的智能体组成,他们配备了相同类别的传感器、部署了相同的检测模型,并且都具有相互通信的能力。这些同构的智能体构成了一个已有的协作系统。随后,场景中从未出现过的模态或感知模型的异构智能体加入到协作系统当中。这种动态特性是在现实世界中部署协作感知的一个显著特征:智能体类别不会在开始时被完全确定,其类型数量可能会随着时间的推移而增加。它与先前的异构协作感知问题(其中异构的类别是提前确定好并固定的)也截然不同。
方法介绍
本文提出的开放异构协作感知框架HEAL(HEterogeneous ALliance),设计了两阶段的方法来将新的异构智能体加入到协作中,以实现不断增长的异构联盟:i)协作基类训练,令初始智能体训练一个特征融合协作网络并创建统一的特征空间;ii)新智能体训练,将新智能体的特征与之前建立的统一特征空间对齐,从而允许新智能体和已有智能体进行特征层面的协作。
对于每个新智能体类型加入协作,只需要第二阶段的训练。值得注意的是,第二阶段的训练可以由智能体所有者独立进行,不涉及与已有智能体的集体训练。这允许新智能体的加入有较低的训练成本,同时还能保护新智能体的模型细节不被暴露。
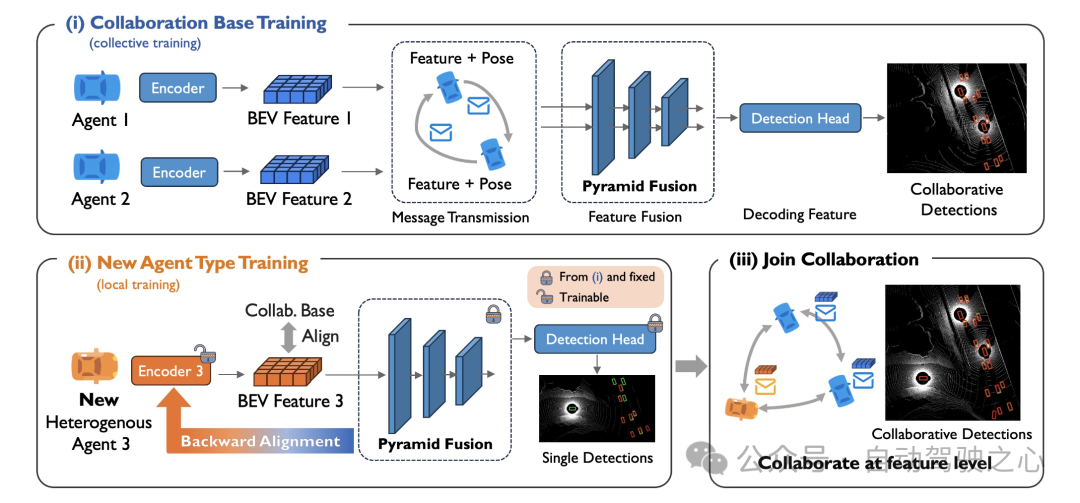
图 3. HEAL的整体框架
一阶段:协作基类训练
我们将场景中一开始存在的个同构智能体作为协作基类,并且训练一个基于特征融合的协作感知网络。我们提出一个新颖的金字塔融合网络来提取并融合多智能体的特征,具体在于:对于每个同构智能体的编码器编码出来的BEV特征,我们让他经过多层不同尺度的ResNeXt网络,以提取粗粒度和细粒度的特征信息。对于不同尺度的特征图,我们都对其应用前景预测器网络,估计BEV每个特征位置存在车辆等前景的概率。在协作者之间,前景的概率图会被归一化,作为将特征图逐像素加权融合的权重分布。获得不同尺度下的融合特征图以后,我们利用一系列上采样网络,将其转化到相同的特征图尺寸,并且得到最终融合的特征图。
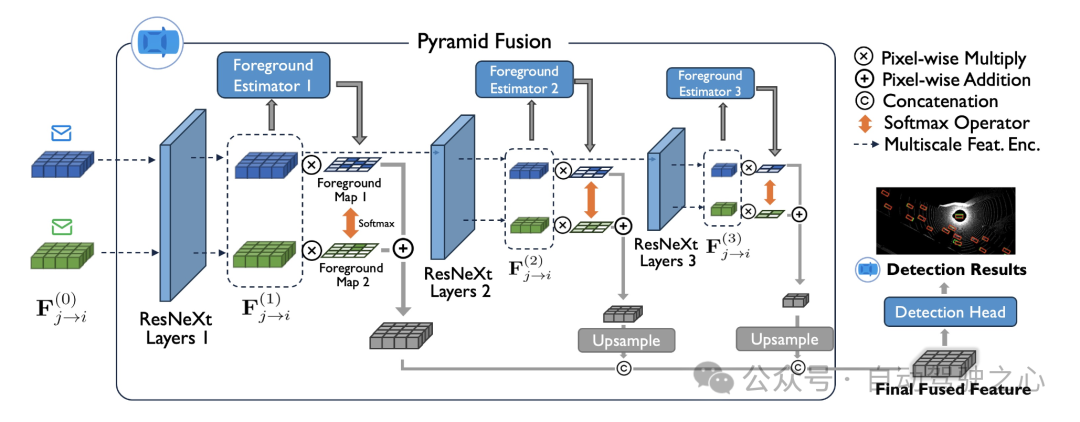
图 4. 金字塔融合网络
融合后的特征图会经过一个检测头,转为最终的协作检测结果。协作检测结果和前景的概率图都受到ground-truth的监督。经过训练后,协作网络(金字塔融合网络)的参数保存了协作基类的相关特征信息,构建了一个共享的特征空间,用于后续新异构智能体的对齐。
二阶段:新智能体训练
我们考虑加入一种新的异构智能体类型。我们提出一种新颖的后向对齐方法。核心想法是利用上一阶段的金字塔融合网络和检测头作为新智能体的检测器后端,并仅更新前端编码器相关的参数。
值得注意的是,我们对新的异构类别的单个智能体进行单体训练,不涉及智能体之间的协作。因此,金字塔融合网络的输入是单张特征图,而不是一阶段中的多智能体特征图。随着预训练的金字塔融合模块和检测头被确立为后端和固定,训练过程演变为让前端编码器适应后端的参数,从而使新智能体编码的特征与统一特征空间保持一致。由于特征和已有智能体的特征对齐,他们能实现高性能的特征层面的协作。
后向对齐还显示了一个独特的优势:训练仅在新的单个智能体上进行。这大大降低了每次新智能体加入的训练成本和时空同步的数据采集成本。此外,它防止新代理的模型细节暴露给他人,并允许新智能体的所有者使用自己的传感器数据训练模型。这将显着解决汽车公司在部署车辆协作感知技术(V2V)时可能存在的许多顾虑。
实验结果
本文在OPV2V数据集的基础上,提出了一个更加数据异构的OPV2V-H数据集,补充了每辆车辆16线和32线的激光雷达数据,以及4个深度摄像头的数据。在OPV2V-H数据集和真实数据集DAIR-V2X上的实验结果表明,HEAL显着地降低了异构智能体加入协作的一系列训练成本(训练参数,FLOPs,训练时间等等),还保持了极高的协作检测性能。
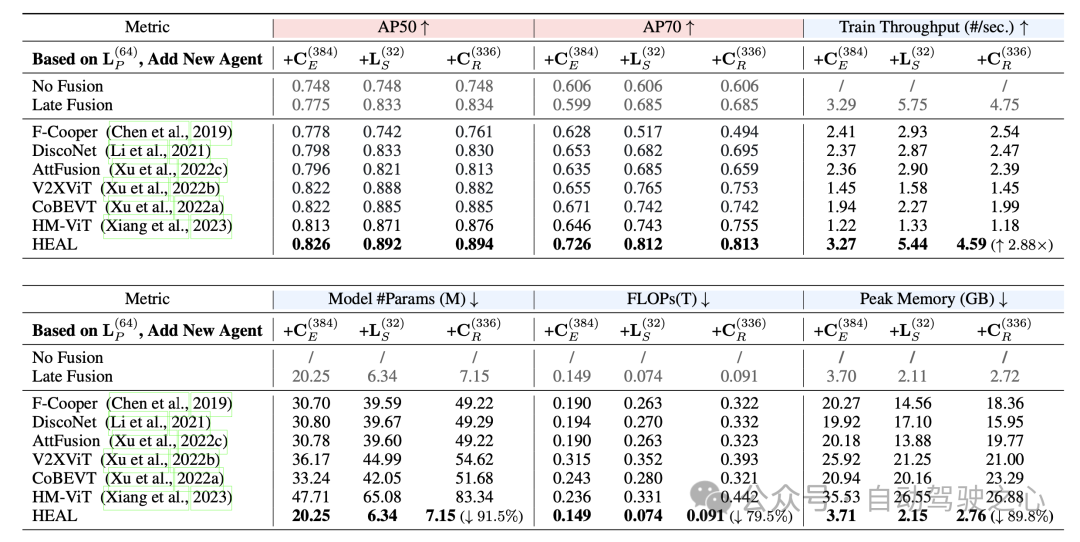
图5. HEAL同时拥有高性能和低训练成本
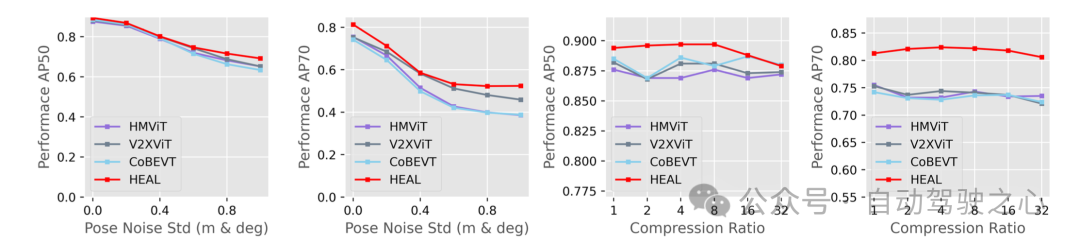
存在定位噪声和特征压缩的情况下,HEAL依然保持了最佳的检测性能,展示了在更加接近现实的设定下, HEAL是目前最有效的协作感知算法。
以上是『拯救』开放异构场景 | HEAL:最新可扩展协作感知框架的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 CUDA之通用矩阵乘法:从入门到熟练!
Mar 25, 2024 pm 12:30 PM
CUDA之通用矩阵乘法:从入门到熟练!
Mar 25, 2024 pm 12:30 PM
通用矩阵乘法(GeneralMatrixMultiplication,GEMM)是许多应用程序和算法中至关重要的一部分,也是评估计算机硬件性能的重要指标之一。通过深入研究和优化GEMM的实现,可以帮助我们更好地理解高性能计算以及软硬件系统之间的关系。在计算机科学中,对GEMM进行有效的优化可以提高计算速度并节省资源,这对于提高计算机系统的整体性能至关重要。深入了解GEMM的工作原理和优化方法,有助于我们更好地利用现代计算硬件的潜力,并为各种复杂计算任务提供更高效的解决方案。通过对GEMM性能的优
 华为干昆 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
华为干昆 ADS3.0 智驾系统 8 月上市 享界 S9 首发搭载
Jul 30, 2024 pm 02:17 PM
7月29日,在AITO问界第四十万台新车下线仪式上,华为常务董事、终端BG董事长、智能汽车解决方案BU董事长余承东出席发表演讲并宣布,问界系列车型将于今年8月迎来华为干昆ADS3.0版本的上市,并计划在8月至9月间陆续推送升级。 8月6日即将发布的享界S9将首发华为ADS3.0智能驾驶系统。华为干昆ADS3.0版本在激光雷达的辅助下,将大幅提升智驾能力,具备融合端到端的能力,并采用GOD(通用障碍物识别)/PDP(预测决策规控)全新端到端架构,提供车位到车位智驾领航NCA功能,并升级CAS3.0全
 深入探讨模型、数据和框架:一份详尽的54页高效大语言模型综述
Jan 14, 2024 pm 07:48 PM
深入探讨模型、数据和框架:一份详尽的54页高效大语言模型综述
Jan 14, 2024 pm 07:48 PM
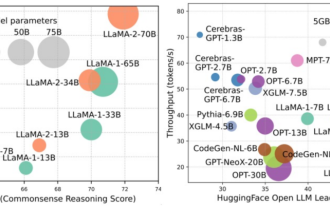
大规模语言模型(LLMs)在许多重要任务中展现出了引人注目的能力,包括自然语言理解、语言生成和复杂推理,并对社会产生了深远的影响。然而,这些出色的能力却需要大量的训练资源(如左图所示)和较长的推理时间(如右图所示)。因此,研究人员需要开发有效的技术手段来解决它们的效率问题。此外,从图的右侧还可以看出,一些高效的LLMs(LanguageModels)如Mistral-7B,已经成功应用于LLMs的设计和部署中。这些高效的LLMs在保持与LLaMA1-33B相近的准确性的同时,能够大大减少推理内存
 苹果16系统哪个版本最好
Mar 08, 2024 pm 05:16 PM
苹果16系统哪个版本最好
Mar 08, 2024 pm 05:16 PM
苹果16系统中版本最好的是iOS16.1.4,iOS16系统的最佳版本可能因人而异添加和日常使用体验的提升也受到了很多用户的好评。苹果16系统哪个版本最好答:iOS16.1.4iOS16系统的最佳版本可能因人而异。根据公开的消息,2022年推出的iOS16被认为是一个非常稳定且性能优越的版本,用户对其整体体验也相当满意。此外,iOS16中新功能的添加和日常使用体验的提升也受到了很多用户的好评。特别是在更新后的电池续航能力、信号表现和发热控制方面,用户的反馈都比较积极。然而,考虑到iPhone14
 常用常新!华为Mate60系列升级HarmonyOS 4.2:AI云增强、小艺方言太好用了
Jun 02, 2024 pm 02:58 PM
常用常新!华为Mate60系列升级HarmonyOS 4.2:AI云增强、小艺方言太好用了
Jun 02, 2024 pm 02:58 PM
4月11日,华为官方首次宣布HarmonyOS4.2百机升级计划,此次共有180余款设备参与升级,品类覆盖手机、平板、手表、耳机、智慧屏等设备。过去一个月,随着HarmonyOS4.2百机升级计划的稳步推进,包括华为Pocket2、华为MateX5系列、nova12系列、华为Pura系列等多款热门机型也已纷纷展开升级适配,这意味着会有更多华为机型用户享受到HarmonyOS带来的常用常新体验。从用户反馈来看,华为Mate60系列机型在升级HarmonyOS4.2之后,体验全方位跃升。尤其是华为M
 电脑操作系统有哪些
Jan 12, 2024 pm 03:12 PM
电脑操作系统有哪些
Jan 12, 2024 pm 03:12 PM
电脑操作系统就是用于管理电脑硬件和软件程序的系统,同时也是根据所有软件系统去开发的操作系统程序,而不同的操作系统,对应的使用人群也是不同的,那么电脑系统有哪些呢?下面,小编跟大家分享电脑操作系统有哪些。所谓的操作系统就是管理电脑硬件与软件程序,所有的软件都是基于操作系统程序的基础上去开发的。其实操作系统种类是很多的,用工业用的,商业用的,个人用的,涉及的范围很广。下面,小编跟大家讲解电脑操作系统有哪些。电脑操作系统有哪些windows系统Windows系统是由美国微软公司开发的一款操作系统。比最
 Linux和Windows系统中cmd命令的区别与相似之处
Mar 15, 2024 am 08:12 AM
Linux和Windows系统中cmd命令的区别与相似之处
Mar 15, 2024 am 08:12 AM
Linux和Windows是两种常见的操作系统,分别代表了开源的Linux系统和商业的Windows系统。在这两种操作系统中,都存在着命令行界面,用于用户与操作系统进行交互。在Linux系统中,用户使用的是Shell命令行,而在Windows系统中,用户使用的是cmd命令行。Linux系统中的Shell命令行是一个非常强大的工具,可以完成几乎所有的系统管理任
 Oracle数据库中修改系统日期方法详解
Mar 09, 2024 am 10:21 AM
Oracle数据库中修改系统日期方法详解
Mar 09, 2024 am 10:21 AM
Oracle数据库中修改系统日期方法详解在Oracle数据库中,修改系统日期的方法主要涉及到修改NLS_DATE_FORMAT参数和使用SYSDATE函数。本文将详细介绍这两种方法及其具体的代码示例,帮助读者更好地理解和掌握在Oracle数据库中修改系统日期的操作。一、修改NLS_DATE_FORMAT参数方法NLS_DATE_FORMAT是Oracle数据
