

开环端到端自动驾驶中自车状态是你所需要的一切吗?

原标题:Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving?
论文链接:https://arxiv.org/abs/2312.03031
代码链接:https://github.com/NVlabs/BEV-Planner
作者单位:南京大学 NVIDIA

论文思路:
端到端自动驾驶最近作为一个有前景的研究方向浮现出来,以全栈视角为目标寻求自动化。沿这条线,许多最新的工作遵循开环评估设置在 nuScenes 上研究规划行为。本文通过进行彻底的分析并揭示更多细节中的难题,更深入地探讨了这个问题。本文最初观察到,以相对简单的驾驶场景为特征的 nuScenes 数据集,导致在整合了自车状态(ego status)的端到端模型中感知信息的利用不足,例如自车的速度。这些模型倾向于主要依赖自车状态进行未来路径规划。除了数据集的局限性之外,本文还注意到当前的指标并不能全面评估规划质量,这导致从现有基准中得出的结论可能存在偏见。为了解决这个问题,本文引入了一个新的指标来评估预测的轨迹是否遵循道路。本文进一步提出了一个简单的基线,能够在不依赖感知标注的情况下达到有竞争力的结果。鉴于现有基准和指标的局限性,本文建议学术界重新评估相关的主流研究,并谨慎考虑持续追求最先进技术是否会产生令人信服的普遍结论。
主要贡献:
基于 nuScenes 的开环自动驾驶模型受到自车状态(速度、加速度、偏航角)的显著影响,这些因素在规划性能中起着关键作用。当自车状态参与其中时,模型的轨迹预测主要受其控制,可能导致对感知信息的利用减少。
现有的规划指标可能无法全面评估模型的实际表现。不同指标下模型的评估结果可能存在明显差异。因此,建议引入更多多样化和全面的指标来评估模型的性能,避免模型只在某些指标下表现优异而忽视其他潜在风险。
相较于在现有的 nuScenes 数据集上取得最先进性能,开发更适用的数据集和指标被认为是一项更为关键和紧迫的挑战。
论文设计:
端到端自动驾驶的目标是综合考虑感知和规划,以全栈方式实现[1, 5, 32, 35]。其基本动机在于将自动驾驶车辆(AV)的感知视为实现目标(规划)的手段,而非过度依赖某些感知度量标准进行拟合。
与感知不同,规划通常更加开放式且难以量化[6, 7]。理想情况下,规划的开放式特性将支持闭环评估设置,在该设置中,其他代理可以对自车的行为做出反应,原始传感器数据也可以相应地变化。然而,到目前为止,在闭环模拟器中进行代理行为建模和真实世界数据模拟[8, 19]仍然是具有挑战性的未解决问题。因此,闭环评估不可避免地引入了与现实世界相当大的域差距(domain gaps)。
另一方面,开环评估旨在将人类驾驶视为真实情况,并将规划表述为模仿学习[13]。这种表述允许通过简单的日志回放,直接使用现实世界的数据集,避免了来自模拟的域差距(domain gaps)。它还提供了其他优势,例如能够在复杂和多样的交通场景中训练和验证模型,这些场景在模拟中经常难以高保真度生成[5]。因为这些好处,一个已经建立的研究领域集中于使用现实世界数据集的开环端到端自动驾驶[2, 12, 13, 16, 43]。
目前流行的端到端自动驾驶方法[12, 13, 16, 43]通常使用 nuScenes[2] 来进行其规划行为的开环评估。例如,UniAD[13] 研究了不同感知任务模块对最终规划行为的影响。然而,ADMLP[45] 最近指出,一个简单的MLP网络也能仅依靠自车状态(ego status) 信息,就实现最先进的规划结果。这激发了本文提出一个重要问题:
开环端到端自动驾驶是否只需要自车状态(ego status) 信息?
本文的答案是肯定的也是否定的,这考虑到了在当前基准测试中使用自车状态(ego status) 信息的利弊:
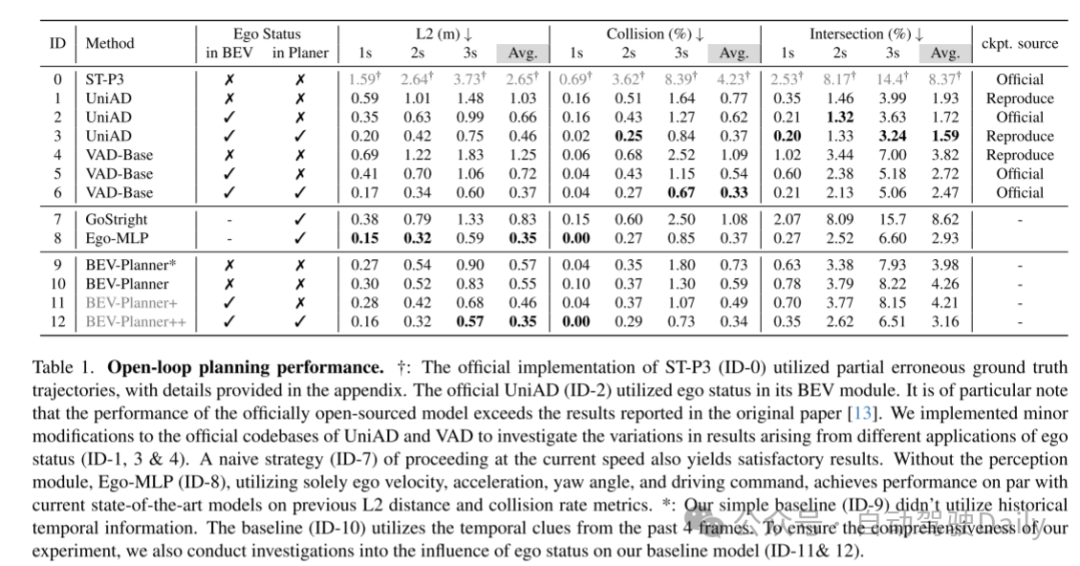
是。自车状态(ego status) 中的信息,如速度、加速度和偏航角,显然应有利于规划任务的执行。为了验证这一点,本文解决了AD-MLP的一个公开问题,并移除了历史轨迹真实值(GTs)的使用,以防止潜在的标签泄露。本文复现的模型,Ego-MLP(图1 a.2),仅依赖自车状态(ego status) ,并且在现有的L2距离和碰撞率指标方面与最先进方法不相上下。另一个观察结果是,只有现有的方法[13, 16, 43],将自车状态(ego status) 信息纳入规划模块中,才能获得与 Ego-MLP 相当的结果。尽管这些方法采用了额外的感知信息(追踪、高清地图等),但它们并未显示出比 Ego-MLP 更优越。这些观察结果验证了自车状态(ego status) 在端到端自动驾驶开环评估中的主导作用。
不是。很明显,作为一个安全至关重要的应用,自动驾驶在决策时不应该仅仅依赖于自车状态(ego status) 。那么,为什么仅使用自车状态(ego status) 就能达到最先进规划结果的现象会发生呢?为了回答这个问题,本文提出了一套全面的分析,涵盖了现有的开环端到端自动驾驶方法。本文识别了现有研究中的主要缺陷,包括与数据集、评估指标和具体模型实现相关的方面。本文在本节的其余部分列举并详细说明了这些缺陷:
数据集不平衡。NuScenes 是一个常用的开环评估任务的基准[11–13, 16, 17, 43]。然而,本文的分析显示,73.9%的 nuScenes 数据涉及直线行驶的场景,如图2所示轨迹分布反映的那样。对于这些直线行驶的场景,大多数时候保持当前的速度、方向或转向率就足够了。因此,自车状态(ego status) 信息可以很容易地被作为一种捷径来适应规划任务,这导致了 Ego-MLP 在 nuScenes 上的强大性能。
现有的评估指标不全面。NuScenes 数据中剩余的26.1%涉及更具挑战性的驾驶场景,可能是规划行为更好的基准。然而,本文认为广泛使用的当前评估指标,如预测与规划真实值之间的L2距离以及自车与周围障碍物之间的碰撞率,并不能准确衡量模型规划行为的质量。通过可视化各种方法生成的众多预测轨迹,本文注意到一些高风险轨迹,如驶出道路可能在现有指标中不会受到严重惩罚。为了回应这一问题,本文引入了一种新的评估指标,用于计算预测轨迹与道路边界之间的交互率(interaction rate)。当专注于与道路边界的交汇率(intersection rates) 时,基准将经历一个实质性的转变。在这个新的评估指标下,Ego-MLP 倾向于预测出比 UniAD 更频繁偏离道路的轨迹。
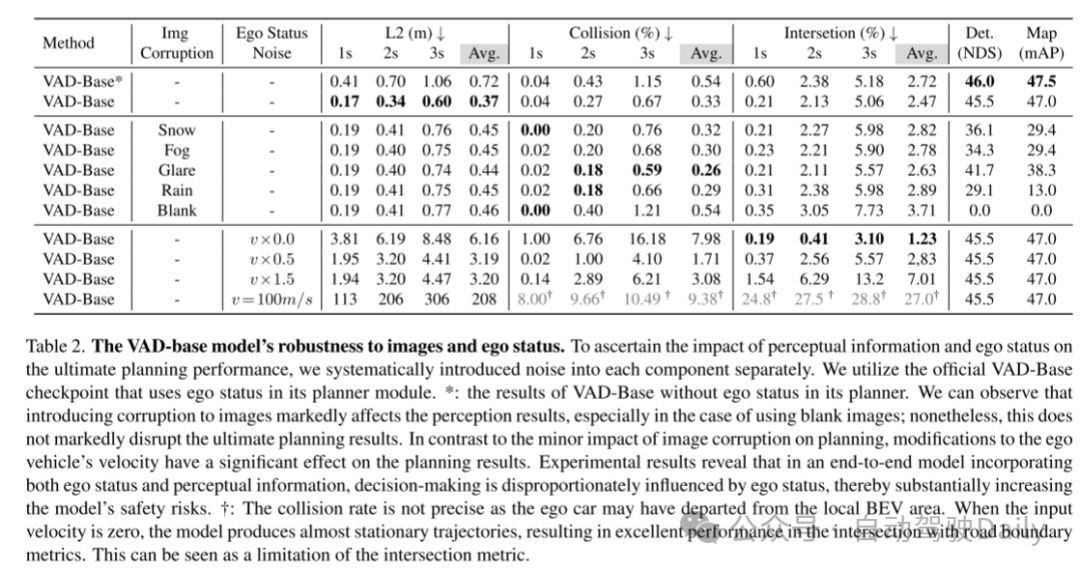
自车状态(ego status)偏见与驾驶逻辑相矛盾。由于自车状态(ego status) 可能导致过拟合,本文进一步观察到一个有趣的现象。本文的实验结果表明,在某些情况下,从现有的端到端自动驾驶框架中完全移除视觉输入,并不会显著降低规划行为的质量。这与基本的驾驶逻辑相矛盾,因为感知被期望为规划提供有用的信息。例如,在 VAD [16] 中屏蔽所有摄像头输入会导致感知模块完全失效,但如果有自车状态(ego status) 的话,规划的退化却很小。然而,改变输入的自身速度可以显著影响最终预测的轨迹。
总之,本文推测,最近在端到端自动驾驶领域的努力及其在 nuScenes 上的最先进成绩很可能是由于过度依赖自车状态(ego status) ,再加上简单驾驶场景的主导地位所造成的。此外,当前的评估指标在全面评估模型预测轨迹的质量方面还不够。这些悬而未决的问题和不足可能低估了规划任务的潜在复杂性,并且造成了一种误导性的印象,那就是在开环端到端自动驾驶中,自车状态(ego status) 就是你所需要的一切。
当前开环端到端自动驾驶研究中自车状态(ego status) 的潜在干扰引出了另一个问题:是否可以通过从整个模型中移除自车状态(ego status) 来抵消这种影响?然而,值得注意的是,即使排除了自车状态(ego status) 的影响,基于 nuScenes 数据集的开环自动驾驶研究的可靠性仍然存疑。
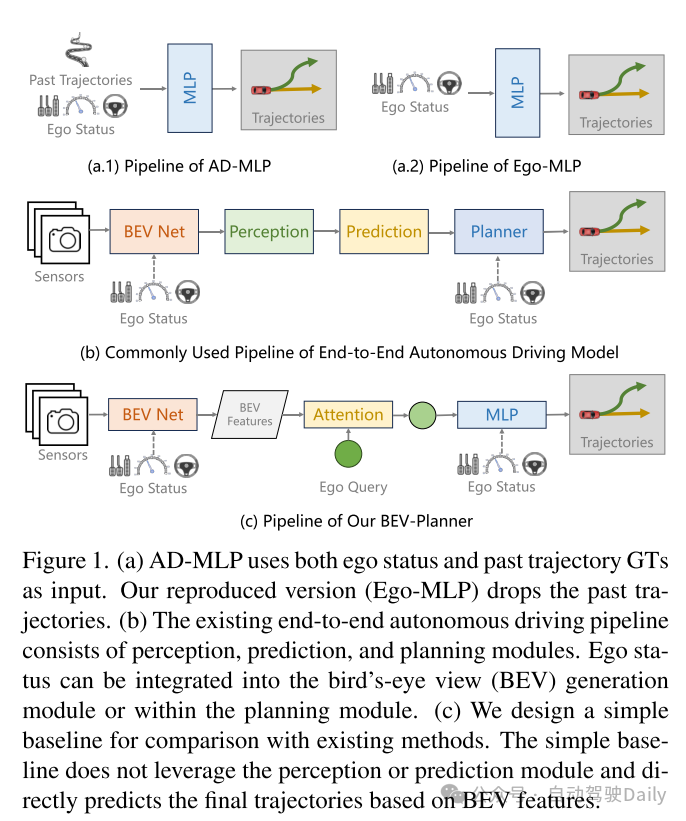
图1。(a) AD-MLP 同时使用自车状态(ego status) 和过去轨迹的真实值作为输入。本文复现的版本(Ego-MLP)去掉了过去的轨迹。(b) 现有的端到端自动驾驶流程包括感知、预测和规划模块。自车状态(ego status) 可以集成到鸟瞰图(BEV)生成模块或规划模块中。(c) 本文设计了一个简单的基线以便与现有方法进行比较。这个简单的基线不利用感知或预测模块,而是直接基于 BEV 特征预测最终轨迹。
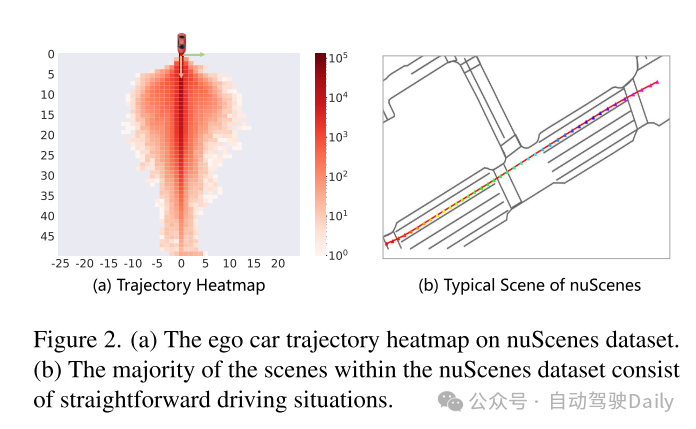
图2。(a) nuScenes 数据集中的自车轨迹热图。(b) nuScenes 数据集中的大多数场景由直行驾驶情况组成。
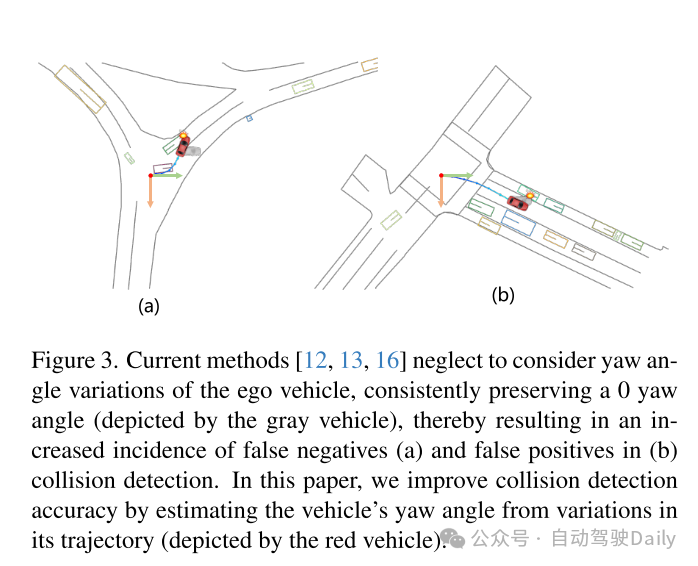
图3。当前方法[12, 13, 16]忽略了考虑自车的偏航角变化,始终保持0偏航角(由灰色车辆表示),从而导致假阴性(a)和假阳性(b)的碰撞检测事件增加。本文通过估计车辆轨迹的变化来估计车辆的偏航角(由红色车辆表示),以提高碰撞检测的准确性。
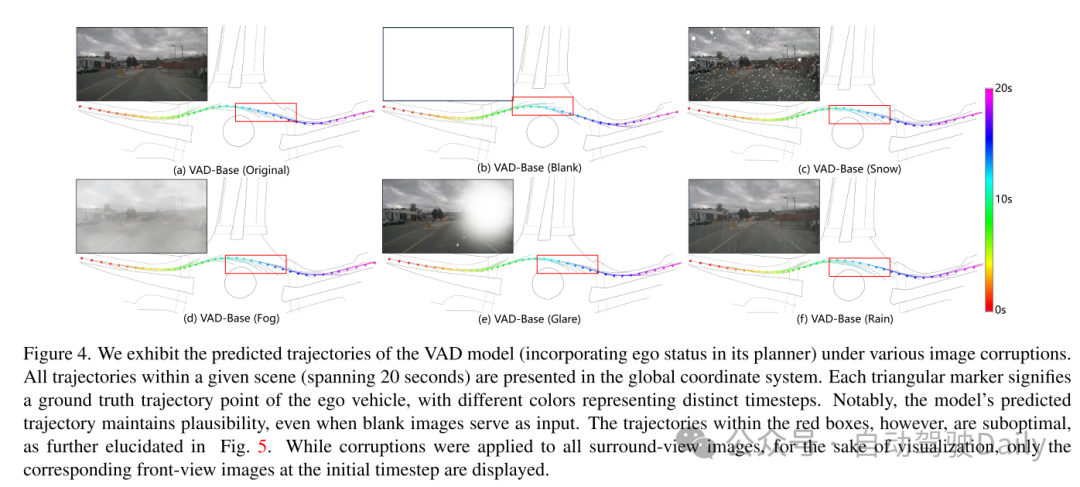
图4。本文展示了 VAD 模型(在其规划器中结合了自车状态(ego status) )在各种图像损坏情况下的预测轨迹。给定场景中的所有轨迹(跨越20秒)都在全局坐标系统中呈现。每个三角形标记代表自车的真实轨迹点,不同的颜色代表不同的时间步。值得注意的是,即使输入为空白图像,模型的预测轨迹仍保持合理性。然而,红色框内的轨迹是次优的,如图5中进一步阐述的。尽管对所有环视图像都进行了损坏处理,但为了便于可视化,只显示了初始时间步对应的前视图像。
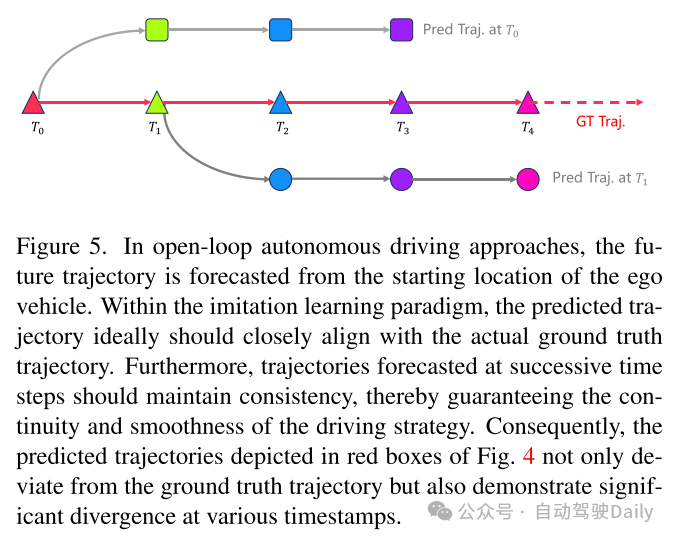
图5。在开环自动驾驶方法中,从自车的起始位置预测未来轨迹。在模仿学习范式内,预测轨迹理想情况下应该与实际的真实轨迹密切对齐。此外,连续时间步预测的轨迹应保持一致性,从而保证驾驶策略的连续性和平滑性。因此,图4 中红色框显示的预测轨迹不仅偏离了真实轨迹,而且在不同的时间戳上显示出显著的分歧。
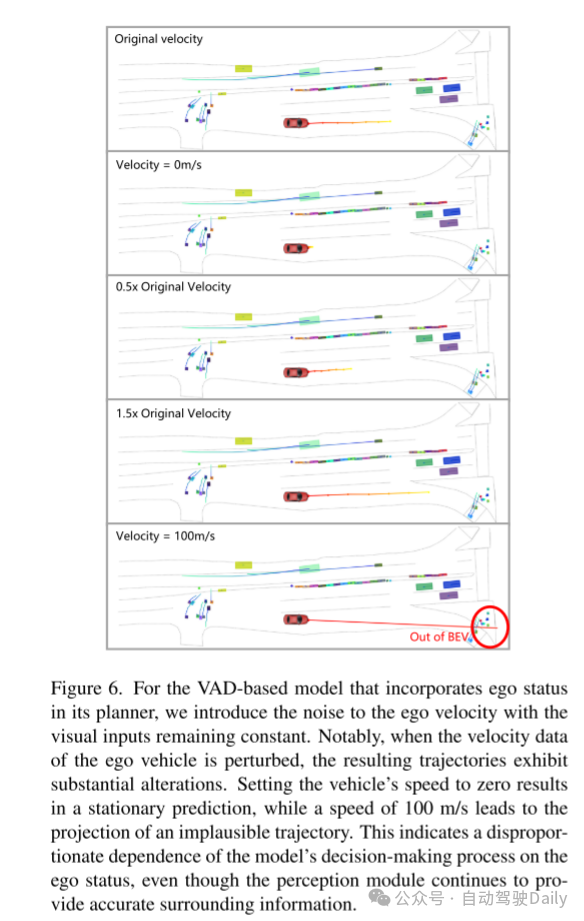
图6。对于在其规划器中结合了自车状态(ego status) 的基于VAD的模型,本文在视觉输入保持恒定的情况下,向自车速度引入噪声。值得注意的是,当自车的速度数据被扰动时,结果轨迹显示出显著的变化。将车辆的速度设置为零会导致静止的预测,而速度为100米/秒会导致预测出不切实际的轨迹。这表明,尽管感知模块继续提供准确的周围信息,模型的决策过程过分依赖于自车状态(ego status) 。
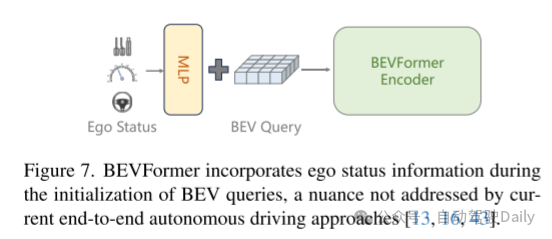
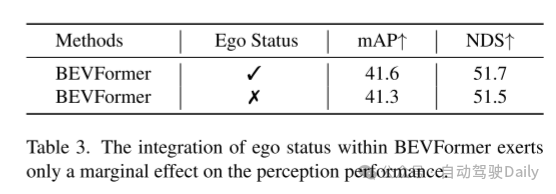
图7。BEVFormer在 BEV查询的初始化过程中结合了自车状态(ego status) 信息,这是当前端到端自动驾驶方法[13, 16, 43]未曾涉及的细节。
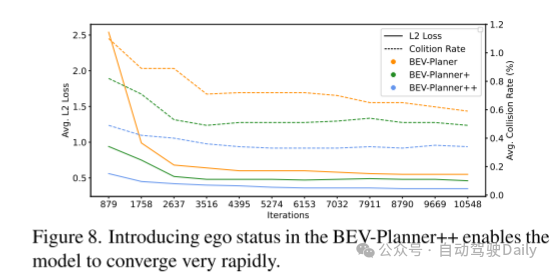
图8。在 BEV-Planner++ 中引入自车状态(ego status) 信息使得模型能够非常快速地收敛。
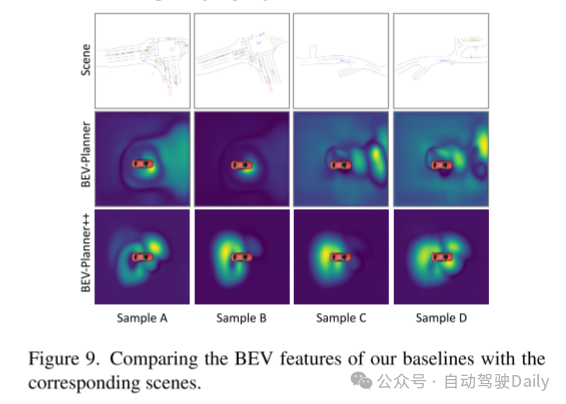
图9。比较本文基线的 BEV特征与相应的场景。
实验结果:

论文总结:
本文深入分析了当前开环端到端自动驾驶方法固有的缺点。本文的目标是贡献研究成果,促进端到端自动驾驶的逐步发展。
引用:
Li Z, Yu Z, Lan S, et al. Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving?[J]. arXiv preprint arXiv:2312.03031, 2023.
以上是开环端到端自动驾驶中自车状态是你所需要的一切吗?的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 joiplay模拟器使用方法介绍
May 04, 2024 pm 06:40 PM
joiplay模拟器使用方法介绍
May 04, 2024 pm 06:40 PM
jojplay模拟器是一款非常好用的手机模拟器,它支持电脑游戏可以在手机上运行,而且兼容性非常好,有些玩家不知道怎么使用,下面小编就为大家带来了使用方法介绍。joiplay模拟器怎么使用1、首先需要下载Joiplay本体及RPGM插件,最好按本体-插件的顺序进行安装,apk包可在Joiplay吧获取(点击获取>>>)。2、安卓完成后,就可以在左下角添加游戏了。3、name随便填,executablefile按CHOOSE选择游戏的game.exe文件。4、Icon可以留空也可以选择自己喜欢的图片
 微星(MSI)主板vt开启方法
May 01, 2024 am 09:28 AM
微星(MSI)主板vt开启方法
May 01, 2024 am 09:28 AM
微星主板怎么开启VT?有哪些方法?本站为广大用户精心整理了微星(MSI)主板vt开启方法供大家参看,欢迎阅读分享!第一步、重启电脑,进入BIOS,开启速度过快无法进入BIOS怎么办?屏幕亮起后不断按下“Del”进入BIOS页面,第二步、在菜单中找到VT选项并开启,不同型号的电脑,BIOS界面不相同,VT的叫法也不相同情况一:1、进入BIOS页面后,找到“OC(或者叫overclocking)”——“CPU特征”——“SVMMode(或者叫Intel虚拟化技术)”选项,把“Disabled(禁止)
 华擎(ASRock)主板vt开启方法
May 01, 2024 am 08:49 AM
华擎(ASRock)主板vt开启方法
May 01, 2024 am 08:49 AM
华擎主板怎么开启VT,有哪些方法,怎么操作。本站为大家整理了华擎(ASRock)主板vt开启方法供用户阅读分享!第一步,重启电脑,屏幕亮起后不断按下“F2”键,进入BIOS页面,开启速度过快无法进入BIOS怎么办?第二步,在菜单中找到VT选项并开启,不同型号的主板,BIOS界面不相同,VT的叫法也不相同1、进入BIOS页面后,找到“Advanced(高级)”——“CPUConfiguration(CPU配置)”——“SVMMOD(虚拟化技术)”选项,把“Disabled”都修改为“Enabled
 自动驾驶场景中的长尾问题怎么解决?
Jun 02, 2024 pm 02:44 PM
自动驾驶场景中的长尾问题怎么解决?
Jun 02, 2024 pm 02:44 PM
昨天面试被问到了是否做过长尾相关的问题,所以就想着简单总结一下。自动驾驶长尾问题是指自动驾驶汽车中的边缘情况,即发生概率较低的可能场景。感知的长尾问题是当前限制单车智能自动驾驶车辆运行设计域的主要原因之一。自动驾驶的底层架构和大部分技术问题已经被解决,剩下的5%的长尾问题,逐渐成了制约自动驾驶发展的关键。这些问题包括各种零碎的场景、极端的情况和无法预测的人类行为。自动驾驶中的边缘场景"长尾"是指自动驾驶汽车(AV)中的边缘情况,边缘情况是发生概率较低的可能场景。这些罕见的事件
 平板电脑怎么装windows系统
May 03, 2024 pm 01:04 PM
平板电脑怎么装windows系统
May 03, 2024 pm 01:04 PM
步步高平板怎么刷windows系统第一种是硬盘安装系统。只要电脑系统没有崩溃,能进入系统,并且能下载东西就可以使用电脑硬盘安装系统。方法如下:根据你的电脑配置,完全可以装WIN7的操作系统。我们选择在vivopad中选择下载小白一键重装系统来安装,先选择好适合你电脑的系统版本,点击“安装此系统”下一步。然后我们耐心等待安装资源的下载,等待环境部署完毕重启即可。vivopad装win11步骤是:先通过软件来检测一下是否可以安装win11。通过了系统检测,进入系统设置。选择其中的更新和安全选项。点击
 人生重开模拟器攻略大全
May 07, 2024 pm 05:28 PM
人生重开模拟器攻略大全
May 07, 2024 pm 05:28 PM
人生重开模拟器是一款非常有意思的模拟小游戏,这款游戏最近非常的火,游戏中有很多的玩法,下面小编就大家带来了人生重开模拟器攻略大全,快来看看都有哪些攻略吧。人生重开模拟器攻略大全人生重开模拟器特色这是一款非常有创造力的游戏,游戏里玩家可以根据自己的想法进行游戏。每天都会有许多的任务可以去完成,在这个虚拟的世界里享受全新的人生。游戏里拥有许多的歌曲,各种各样不一样的人生等候你来感受。人生重开模拟器游戏内容天赋抽卡:天赋:必选神秘的小盒子,才能修仙。各种各样的小胶囊可选,避免中途死掉。克苏鲁选了可能会
 joiplay模拟器字体设置方法介绍
May 09, 2024 am 08:31 AM
joiplay模拟器字体设置方法介绍
May 09, 2024 am 08:31 AM
jojplay模拟器其实可以自定义游戏字体的,而且可以解决文字出现缺字、方框字的问题,想必不少玩家还不知道怎么操作,下面小编就为大家带来了joiplay模拟器字体设置方法介绍。joiplay模拟器字体怎么设置1、首先打开joiplay模拟器,点击右上角的设置(三个点),找到。2、在RPGMSettings一栏,第三行CustomFont自定义字体,点击选择。3、选择字体文件,点击ok就行了,注意不要按右下角“保存”图标,不然会原默认设置。4、推荐方正准圆简体(已在复兴、重生游戏文件夹内)。joi
 雷电模拟器怎么删除应用?-雷电模拟器删除应用的方法?
May 08, 2024 pm 02:40 PM
雷电模拟器怎么删除应用?-雷电模拟器删除应用的方法?
May 08, 2024 pm 02:40 PM
雷电模拟器版本官方版是一款相当专业的安卓模拟器工具。那么雷电模拟器怎么删除应用?雷电模拟器删除应用的方法?下面就让小编给大家解答下吧!雷电模拟器怎么删除应用?1、点击并长按你想要删除的应用图标。2、等待一段时间,直到出现卸载或删除应用的选项。3、将应用拖到卸载选项处。4、在弹出的确认窗口中,点击确定就可以完成应用的删除。
