
2024年2月27日,由毫末智行人工智能技术团队提交的论文《Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications》成功入选国际顶会 CVPR 2024。
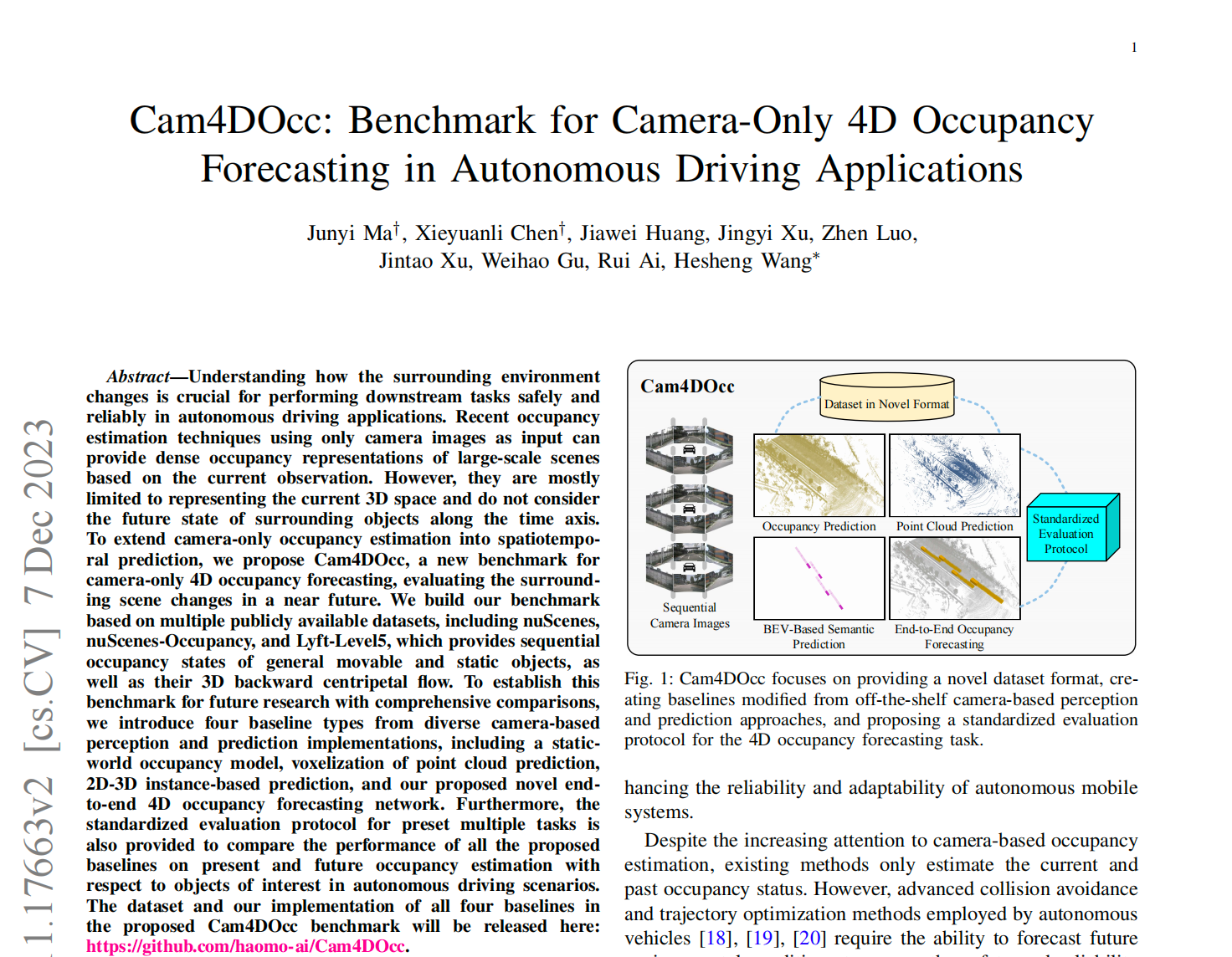
Cam4DOcc是毫末提出的一种新的基准,它利用摄像头进行4D占据网格预测。这种方法可以评估近期内周围场景的变化,将摄像头的占据网格估计扩展到时空预测。这样一来,自动驾驶系统在感知和预测周围环境动态变化方面的能力得到了提升。
首先,毫末基于几个公开可用的数据集创建了新格式的数据集,并进一步提出了标准化的评估协议以及四种基线类型,为 Cam4DOcc 基准提供基本参考。其次,毫末提出了第一个基于摄像头的 4D 占据预测网络 OCFNet,以端到端的方式估计未来的占据状态。最后,毫末基于 Cam4DOcc 基准,进行了多个实验,涉及四种不同的任务,以全面评估所提出的基线以及 OCFNet。实验结果表明,OCFNet 优于所有基线,并且即使在看到有限的训练数据时仍能产生合理的未来占据。通过比较四种不同类型的基线,毫末证明了端到端时空网络可能是仅利用摄像头进行占据预测的最有前途的研究方向。此外,使用膨胀的 GMO 标注和额外的 3D 反向径向流也被验证是对于 4D 占据预测有益的。

计算机视觉与模式识别会议(IEEE Conference on Computer Vision and Pattern Recognition,简称:CVPR)是计算机视觉与模式识别领域的三大顶级会议之一,由纽卡斯尔大学、悉尼科技大学、约翰霍普金斯大学等顶级名校和机构组织。CVPR 有着非常严苛的录用标准,毫末提出Cam4DOcc方法的论文成功入选 CVPR2024,代表了对毫末技术探索成果的认可。
从成立以来,毫末始终立足技术创新,不断取得众多引领行业的技术专利成果,并在国内率先布局大模型、大算力、大数据的自动驾驶技术发展方向。毫末发布的行业首个自动驾驶生成式大模型 DriveGPT 雪湖·海若,在自动驾驶系统开发过程中带来了巨大的技术提升,使得毫末自动驾驶系统开发彻底进入了全新模式,也极大加速汽车智能化的发展进程。
以上是毫末Cam4DOcc入选CVPR2024:仅用摄像头做4D占据网络预测,让自动驾驶拥有时空预测能力的详细内容。更多信息请关注PHP中文网其他相关文章!






















