

首次攻克「图基础模型」三大难题!港大开源OpenGraph:零样本学习适配多种下游任

图学习(Graph Learning)技术已经被广泛应用于各个领域,包括推荐系统、社交网络分析、引用网络和交通网络等。这种技术能够有效地挖掘和学习复杂的关系数据,为数据科学家和工程师提供了强大的工具。通过图学习算法,可以更好地理解数据之间的关联和联系,从而帮助我们发现隐藏在数据背后的规律和模式。在实际应用中,图学习技术可以帮助我们构建更准确和
图神经网络(Graph Neural Networks, GNNs)利用迭代的消息传递机制来捕获图结构数据中的复杂高阶关系,在各种图学习应用中取得了显着的成就。
通常,这种端到端的图神经网络需要大量、高质量的标注数据才能获得较好的训练效果。
近年来,一些工作提出图模型的预训练-微调(Pre-training and Fine-tuning)模式,使用各种自监督学习任务在无标注的图数据上首先进行预训练,再在少量标注数据上进行微调,以对抗监督信号不足的问题。这里的自监督学习任务包括对比学习、掩码重建、局部全局互信息最大化等方法。
尽管这种预训练方法在一定程度上取得了成功,但它们在泛化能力方面存在一定局限性,尤其是在预训练和下游任务之间出现分布偏移时。
在推荐系统中,预训练模型基于早期数据进行训练,但用户偏好和商品热度往往会发生变化,这就需要模型不断更新以适应新的信息。
为了应对这一挑战,近期的研究提出了针对图模型的提示微调方法,使预训练模型能够更有效地适应于不同的下游任务和数据。
虽然上述研究推动了图神经网络模型的泛化性能,但这些模型都基于一个假设:训练数据和测试数据具有相同的节点集合和特征空间。
这极大地限制了预训练图模型的应用范围。因此,本文探索进一步提升图模型泛化能力的方法。
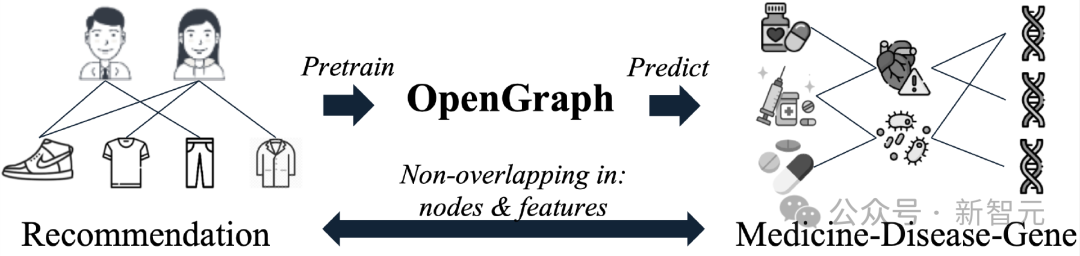
我们期望OpenGraph能够捕捉通用的拓扑结构模式,实现对测试数据的零样本预测。这意味着通过前向传播过程,能够高效地提取特征并准确预测测试图数据。
模型的训练过程在完全不同的图数据上进行,在训练阶段不接触测试图的任何元素,包括节点、边、特征向量。
为了达成这一目的,本文需要解决以下三个挑战:
C1. 跨数据集的Token集合变化
零样本图预测任务的一个显着困难是,不同的图数据通常有完全不同的图token集合。具体来说,不同图的节点集合通常没有交集,并且不同图数据集也经常使用完全不同的节点特征。这使得模型不能通过学习和特定数据集的图token绑定的参数,来进行跨数据集的预测任务。
C2. 高效的节点间关系建模
在图学习领域,节点之间常常存在错综复杂的依赖关系,模型需要对节点的局部和全局邻域关系进行综合考量。在搭建通用图模型时,一个重要的任务是能够高效地建模节点间关系,这能够增强模型在处理大量图数据时的模型效果和可扩展性。
C3. 训练数据稀缺
由于隐私保护、数据采集成本等原因,在图学习的很多下游领域中都广泛存在数据稀缺问题,这使得通用图模型的训练容易缺乏对某些下游领域的了解而产生次优的训练效果。
为了应对上述挑战,香港大学的研究人员提出了 OpenGraph,这是一个擅长零样本学习的模型,能够识别不同下游领域之间可迁移的拓扑结构模式。

论文链接:https://arxiv.org/pdf/2403.01121.pdf
源码链接:https://github.com/HKUDS/OpenGraph
通过创建一个具有拓扑感知投影方案的图tokenizer来解决挑战 C1,从而生成统一的图tokens。
为了应对挑战 C2,设计了一个可扩展的图Transformer,它配备了基于锚点采样的高效自注意力机制,并包括了token序列采样以实现更高效的训练。
为了解决挑战 C3,我们利用大型语言模型进行数据增强,以丰富我们的预训练,使用提示树算法和吉布斯采样来模拟现实世界的图结构关系数据。我们在多个图数据集上进行的广泛测试显示了 OpenGraph 在各种设置中的卓越泛化能力。
模型介绍
模型整体架构如下图所示,可以分为三个部分,分别为1)统一图Tokenizer,2)可扩展的图Transformer,3)大语言模型知识蒸馏。

统一图Tokenizer
为了应对不同数据集在节点、边、特征上存在的巨大差异,我们的首要任务是建立一个统一的图tokenizer,能够有效地将不同图数据影射为统一的token序列。在我们的tokenizer中,每个token都有一个语义向量,用于描述对应节点的信息。
通过采用统一的节点表征空间,以及灵活的序列数据结构,我们希望为不同的图数据进行标准化、高效的tokenization。
为了达成这一目的,我们的tokenizer采用了经过平滑的拓扑信息,以及一个从节点空间到隐表征空间的映射函数。
高阶平滑邻接矩阵
在图tokenization过程中,使用邻接矩阵的高次幂作为输入之一,这种方式既能够获取图结构的高阶连接关系,也能够解决原始邻接矩阵中连接稀疏性的问题。
计算过程中进行了Laplacian归一化,并将不同阶的邻接矩阵幂全部考虑进来,具体计算方法如下。

对任意图的拓扑感知映射
不同数据集的邻接矩阵在维度上存在巨大的差异,这使得我们不能直接将邻接矩阵作为输入,再使用一个固定输入维度的神经网络进行处理。
我们的解决方案是首先将邻接矩阵投射为节点表征序列的形式,后续即可使用可变长的序列模型进行处理。而为了减少映射过程的信息损失,我们提出了一种拓扑感知的映射方法。
首先,我们拓扑感知映射的值域是一个维度较高的隐表征空间。之前的一些工作指出,在采用较大的隐空间维度时,即使是随机的映射也常常可以产生令人满意的表征效果。
为了进一步保留图结构信息,并减少随机性影响,我们使用快速特征值分解(SVD)来构造我们的映射函数。在实际实验中,两轮的快速特征值分解可以有效地保留拓扑信息,且产生的的计算开销相对其他模块可以忽略不计。
可扩展的图Transformer
经过无参数的图tokenization过程,对具有不同特征的图数据,OpenGraph分配了统一的拓扑感知图token表征。接下来的任务是采用可训练的神经网络,对节点间的复杂依赖关系进行建模。
OpenGraph采用了transformer架构,以利用其在复杂关系建模方面的强大能力。为了保证模型效率和性能,我们引入了以下两种采样技巧。
Token序列采样
由于我们的图token序列数据一般有较大的token数量和隐表征维度,OpenGraph采用的图transformer对输入的token序列进行采样,只学习当前训练批次内的token间两两关系,使得需要建模的关系对数量从节点数量平方,降低到训练批次大小的平方,从而大大减小图transformer在训练阶段的时间和空间开销。并且,这种采样方法能够让模型在训练时更加关注当前的训练批次。
尽管对输入数据进行了采样,由于我们的初始图token表征包含了节点间的拓扑关系,采样的token序列仍然能够一定程度地反映全图所有节点的信息。
自注意力中的锚点采样方法
虽然token序列采样将复杂度从节点数量平方降低到了批次大小平方,但平方级别的复杂度对批次大小有着较大的限制,使得模型训练无法采用较大的批次,从而影响整体的训练时间和训练稳定性。
为了缓解这一问题,OpenGraph的transformer部分放弃了对所有token之间两两关系的建模,而是采样部分锚点,将所有节点间的关系学习拆分成两次所有节点与锚点之间的关系学习。
大语言模型知识蒸馏
由于数据隐私等原因,获取各个领域的数据来训练通用图模型是很有挑战性的。感受到大型语言模型(LLM)所展示的惊人知识和理解能力,我们利用其力量来生成各种图结构数据,用于通用图模型的训练。
我们设计的数据增强机制,使LLM增强的图数据能够更好地近似真实世界图的特征,从而提高了增强数据的相关性和有用性。
基于LLM的节点生成
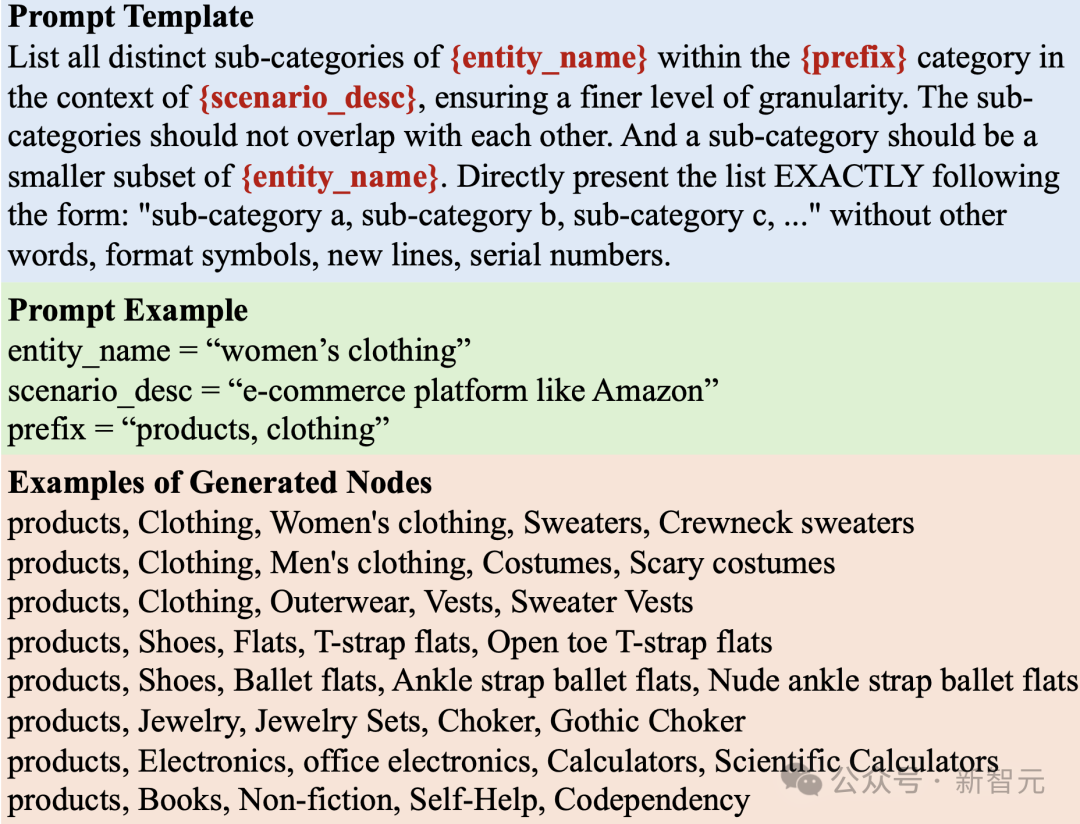
在生成图时,我们的初始步骤是创建一个适合特定应用场景的节点集。每个节点都具有一个基于文本的特征描述,该描述有助于后续的边生成过程。
然而,当处理真实世界场景时,这项任务可能特别具有挑战性,因为节点集的规模很大。例如,在电子商务平台上,图数据可能包含数十亿种产品。因此,有效地使LLM生成大量节点成为一个重大挑战。
为了解决上述挑战,我们采用了一种策略,不断将一般节点分成更细粒度的子类别。
例如,当生成电商场景下的产品节点时,首先使用类似于「列出淘宝等电子商务平台上的所有产品的子类别」的查询提示LLM。LLM回答了一个子类别列表,如“衣服”、“家居厨具”和“电子产品”等。
然后,我们要求LLM进一步细化每个子类别来继续这一迭代分裂过程。这个过程一直重复,直到我们获得了类似于真实世界实例的节点,例如一个带有「衣服」、「女士衣物」、「毛线衫」、「带兜毛线衫」和「白色带兜毛线衫」标签的产品。
提示树算法
将节点分割成子类别并生成细粒度实体的过程遵循一种树状结构。最初的一般节点(例如“产品”、“深度学习论文”)作为根,细粒度实体作为叶节点。我们采用树形提示策略来遍历和生成这些节点。
基于LLM和吉布斯采样的边生成
为了生成边,我们使用吉布斯采样算法与上文生成的节点集。算法从一个随机样本开始进行迭代,每次在当前样本的基础上,采样对其中某一个数据维度进行改变后得到的样本。
这一算法的关键在于估计在当前样本的条件下,某个数据维度改变的条件概率。我们提出根据节点生成时得到的文本特征,由LLM进行概率估计。
由于边的集合空间较大,为了避免让LLM对其进行探索而产生巨大的开销,我们首先使用LLM对节点集合进行表征,再基于表征向量,使用简单的相似度算子对节点间关系进行计算。在以上的边生成框架内,我们还采用了以下三种重要的技巧进行调整。
动态概率归一化
由于LLM表征的相似度可能与[0, 1]范围差距巨大,为了获得更适合采样的概率数值,我们使用一种动态概率归一化的方法。
该方法动态维护采样过程中最近的T'个相似度估计数值,计算他们的均值和标准差,最后将当前的相似度估计映射到该均值上下两个标准差的分布范围中,从而得到近似[0, 1]的概率估计。
引入节点局部性
基于LLM的边生成方法,能够有效地根据节点的语义相似性,确定他们的潜在连接关系。
然而,它倾向于在所有语义相关的节点之间创建过多的连接,忽视了真实世界图中重要的局部性概念。
在现实世界中,节点更有可能连接到相关节点的子集,因为它们通常只能够与一部分节点有限地互动。为了模拟这一重要特性,引入了一种在边生成过程中将局部性纳入考虑的方法。
每个节点都随机分配一个局部性索引,两个节点之间的交互概率受到局部性索引绝对差值的衰减影响,节点的局部性索引差别越大,则衰减越严重。
注入图拓扑模式
为了使生成的图数据更加符合拓扑结构的模式,我们在第一次图生成过程中再次生成修正的节点表征。
这一节点表征使用简单的图卷积网络在初始生成图上得到,他能更好地符合图结构数据的分布特点,避免图和文本空间之间的分布偏移。最终,我们在修正的节点表征基础上,再次进行图采样,得到最终的图结构数据。
实验验证
实验中,我们仅使用基于LLM的生成数据集进行OpenGraph模型训练,而测试数据集都是各个应用场景下的真实数据集,并包括了节点分类和链路预测两类任务。实验的具体设置如下:
0-shot设置
为了验证OpenGraph的零样本预测能力,OpenGraph在生成的训练数据集上测试,再使用完全不同的真实测试数据集进行效果测试。训练数据集和测试数据集在节点、边、特征、标注上均没有任何重合。
Few-shot设置
由于大多数现有方法无法进行有效的零样本预测,我们采用少样本预测的方式对他们进行测试。基线方法可以在预训练数据上进行预训练,之后使用k-shot样本进行训练、微调或提示微调。
整体效果对比
在2个任务一共8个测试数据集上的测试效果如下所示。
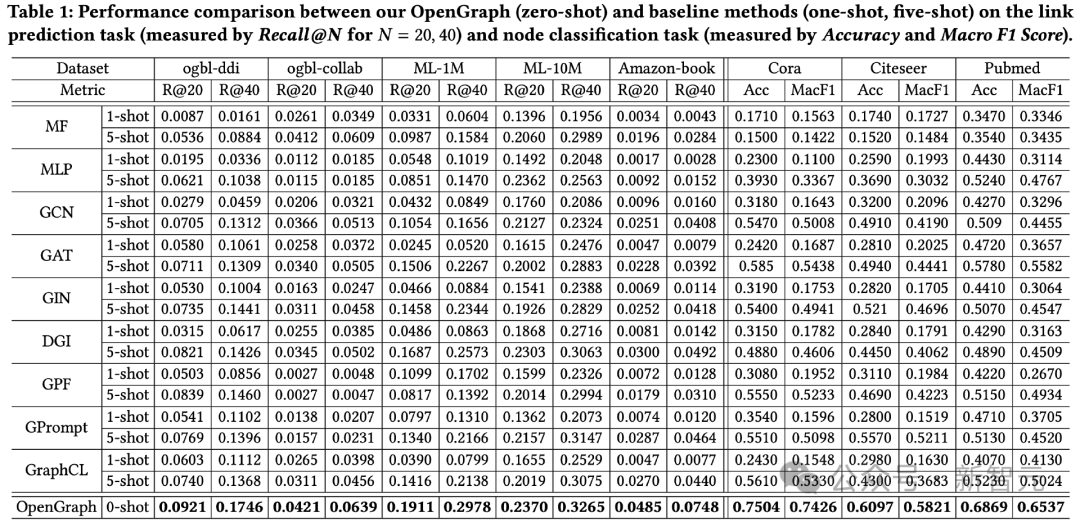
从中可以观察到:
1)在跨数据集的情况下,OpenGraph的零样本预测效果相对现有方法具有较大的优势。
2)在跨数据集迁移的情况下,现有的预训练方法有时甚至还不如其基础模型仅在少样本上从零开始训练,这体现了图模型获得跨数据集泛化能力的困难。
图Tokenizer研究
接下来我们探究图tokenizer设计对效果的影响。首先我们调整了邻接矩阵平滑结束,测试其对效果的影响。0阶时效果出现严重衰减,指示了采用高阶平滑的重要性。
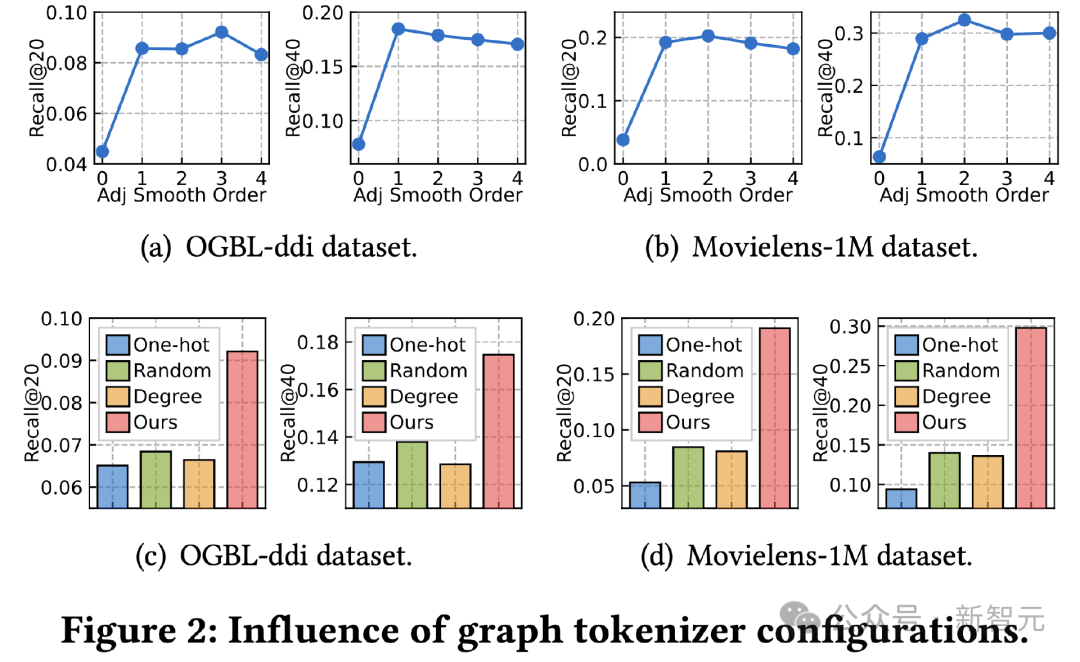
其次,我们将拓扑感知映射函数替换成其他简单方法,包括跨数据集的可学习独热id表征、随机映射、基于节点度的可学习表征。
结果显示三种替代方案均效果较差,其中跨数据集学习id表征效果最差,现有工作中常用的度表征效果也衰减较大,不可学习的随机映射在所有替代方法中表现最好,但仍与我们的拓扑感知映射有很大的差距。
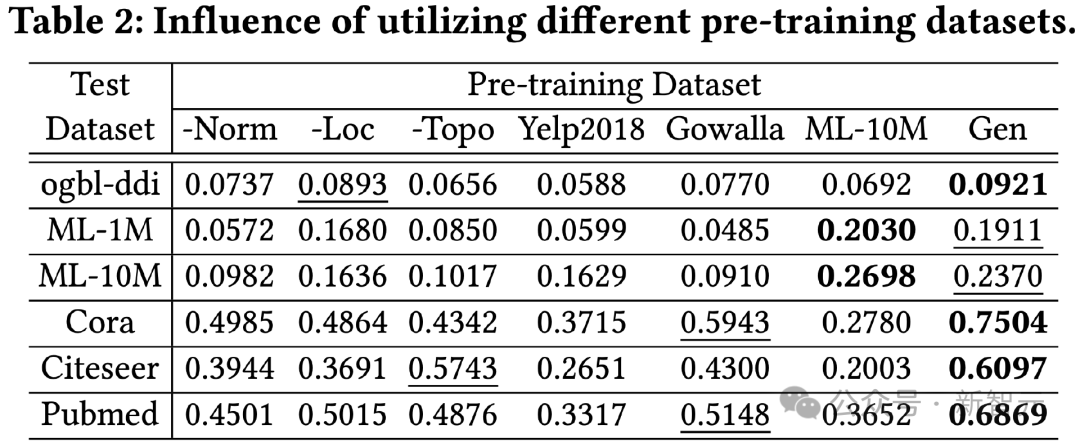
预训练数据集研究
为了验证基于LLM的知识蒸馏方法的有效性,我们使用不同的预训练数据集对OpenGraph进行训练,并测试其在不同测试集上的效果。
本实验比较的预训练数据集包括单独去除我们生成方法中某个技巧的版本、与测试数据集不相关的两个真实数据集Yelp2018和Gowalla、以及与测试数据集相关的ML-10M数据集,从结果中可以看出:
1)总体来说,我们的生成数据集能够在所有测试数据上产生较好的效果。
2)所测试的三种生成技巧均起到了较为显著的提升效果。
3)使用真实数据集(Yelp、Gowalla)进行训练可能反而会带来负面效果,这可能源于不同真实数据集之间的分布差异。
4)ML-10M在ML-1M和ML-10M上均取得了最佳效果,这说明使用相似的训练数据集能够产生较好的效果。
Transformer中的采样技巧研究
这项实验对我们图transformer模块中的token序列采样(Seq)和锚点采样(Anc)进行了消融测试。
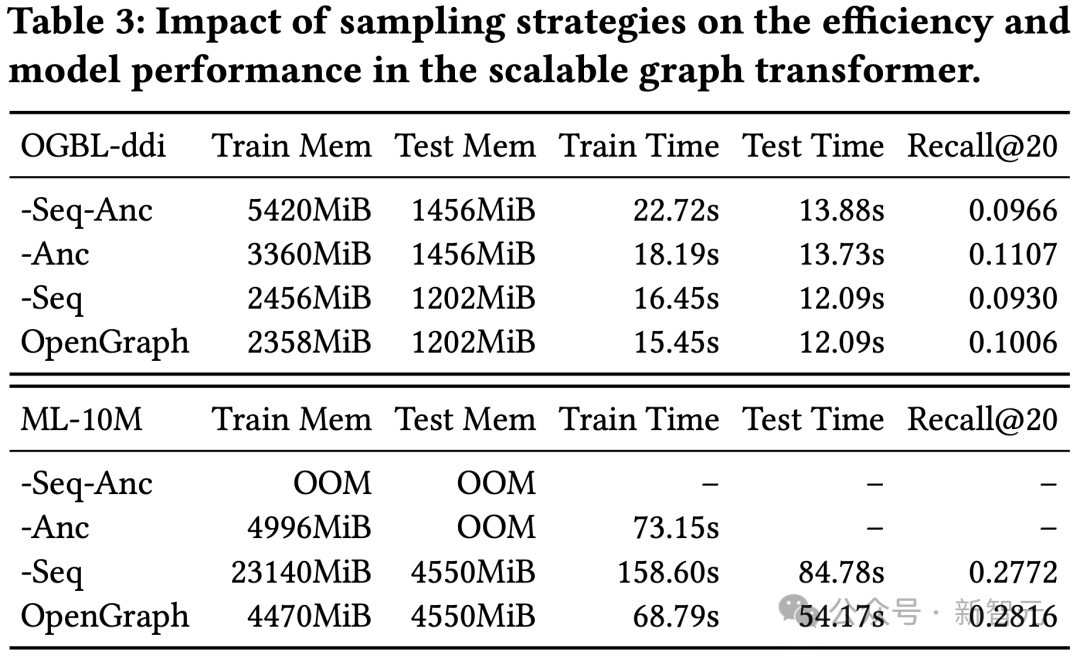
结果显示,两种采样方法能够在训练和测试过程优化模型的空间和时间开销。在效果方面,token序列采样对模型效果有正向作用,而ddi数据集上的结果显示,锚点菜样对模型效果有负面效果。
结论
本研究的主要焦点是开发一个高度适应性的框架,能够精确地捕捉和理解各种图结构中复杂的拓扑模式。
通过发挥所提出模型的潜力,我们的目的是显著提高模型的泛化能力,使其在包括各种下游应用在内的零样本图学习任务中表现出色。
为了进一步提高OpenGraph的效率和健壮性,我们在可扩展的图transformer架构和基于LLM的数据增强机制的基础上构建了我们的模型。
通过在多个基准数据集上进行的大量实验,我们验证了模型的杰出泛化能力。本研究在图基座模型方向作出了初步探索的尝试。
在未来的工作中,我们计划赋予我们的框架自动发现噪声连接和具有反事实学习影响力的结构的能力,同时学习各种图的通用和可转移的结构模式。
以上是首次攻克「图基础模型」三大难题!港大开源OpenGraph:零样本学习适配多种下游任的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 全球最强开源 MoE 模型来了,中文能力比肩 GPT-4,价格仅为 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
全球最强开源 MoE 模型来了,中文能力比肩 GPT-4,价格仅为 GPT-4-Turbo 的近百分之一
May 07, 2024 pm 04:13 PM
想象一下,一个人工智能模型,不仅拥有超越传统计算的能力,还能以更低的成本实现更高效的性能。这不是科幻,DeepSeek-V2[1],全球最强开源MoE模型来了。DeepSeek-V2是一个强大的专家混合(MoE)语言模型,具有训练经济、推理高效的特点。它由236B个参数组成,其中21B个参数用于激活每个标记。与DeepSeek67B相比,DeepSeek-V2性能更强,同时节省了42.5%的训练成本,减少了93.3%的KV缓存,最大生成吞吐量提高到5.76倍。DeepSeek是一家探索通用人工智
 替代MLP的KAN,被开源项目扩展到卷积了
Jun 01, 2024 pm 10:03 PM
替代MLP的KAN,被开源项目扩展到卷积了
Jun 01, 2024 pm 10:03 PM
本月初,来自MIT等机构的研究者提出了一种非常有潜力的MLP替代方法——KAN。KAN在准确性和可解释性方面表现优于MLP。而且它能以非常少的参数量胜过以更大参数量运行的MLP。比如,作者表示,他们用KAN以更小的网络和更高的自动化程度重现了DeepMind的结果。具体来说,DeepMind的MLP有大约300,000个参数,而KAN只有约200个参数。KAN与MLP一样具有强大的数学基础,MLP基于通用逼近定理,而KAN基于Kolmogorov-Arnold表示定理。如下图所示,KAN在边上具
 特斯拉机器人进厂打工,马斯克:手的自由度今年将达到22个!
May 06, 2024 pm 04:13 PM
特斯拉机器人进厂打工,马斯克:手的自由度今年将达到22个!
May 06, 2024 pm 04:13 PM
特斯拉机器人Optimus最新视频出炉,已经可以在厂子里打工了。正常速度下,它分拣电池(特斯拉的4680电池)是这样的:官方还放出了20倍速下的样子——在小小的“工位”上,拣啊拣啊拣:这次放出的视频亮点之一在于Optimus在厂子里完成这项工作,是完全自主的,全程没有人为的干预。并且在Optimus的视角之下,它还可以把放歪了的电池重新捡起来放置,主打一个自动纠错:对于Optimus的手,英伟达科学家JimFan给出了高度的评价:Optimus的手是全球五指机器人里最灵巧的之一。它的手不仅有触觉
 美国空军高调展示首个AI战斗机!部长亲自试驾全程未干预,10万行代码试飞21次
May 07, 2024 pm 05:00 PM
美国空军高调展示首个AI战斗机!部长亲自试驾全程未干预,10万行代码试飞21次
May 07, 2024 pm 05:00 PM
最近,军事圈被这个消息刷屏了:美军的战斗机,已经能由AI完成全自动空战了。是的,就在最近,美军的AI战斗机首次公开,揭开了神秘面纱。这架战斗机的全名是可变稳定性飞行模拟器测试飞机(VISTA),由美空军部长亲自搭乘,模拟了一对一的空战。5月2日,美国空军部长FrankKendall在Edwards空军基地驾驶X-62AVISTA升空注意,在一小时的飞行中,所有飞行动作都由AI自主完成!Kendall表示——在过去的几十年中,我们一直在思考自主空对空作战的无限潜力,但它始终显得遥不可及。然而如今,
 全面超越DPO:陈丹琦团队提出简单偏好优化SimPO,还炼出最强8B开源模型
Jun 01, 2024 pm 04:41 PM
全面超越DPO:陈丹琦团队提出简单偏好优化SimPO,还炼出最强8B开源模型
Jun 01, 2024 pm 04:41 PM
为了将大型语言模型(LLM)与人类的价值和意图对齐,学习人类反馈至关重要,这能确保它们是有用的、诚实的和无害的。在对齐LLM方面,一种有效的方法是根据人类反馈的强化学习(RLHF)。尽管RLHF方法的结果很出色,但其中涉及到了一些优化难题。其中涉及到训练一个奖励模型,然后优化一个策略模型来最大化该奖励。近段时间已有一些研究者探索了更简单的离线算法,其中之一便是直接偏好优化(DPO)。DPO是通过参数化RLHF中的奖励函数来直接根据偏好数据学习策略模型,这样就无需显示式的奖励模型了。该方法简单稳定
 AI初创集体跳槽OpenAI,Ilya出走后安全团队重整旗鼓!
Jun 08, 2024 pm 01:00 PM
AI初创集体跳槽OpenAI,Ilya出走后安全团队重整旗鼓!
Jun 08, 2024 pm 01:00 PM
上周,在内部的离职潮和外部的口诛笔伐之下,OpenAI可谓是内忧外患:-侵权寡姐引发全球热议-员工签署「霸王条款」被接连曝出-网友细数奥特曼「七宗罪」辟谣:根据Vox获取的泄露信息和文件,OpenAI的高级领导层,包括Altman在内,非常了解这些股权回收条款,并且签署了它们。除此之外,还有一个严峻而紧迫的问题摆在OpenAI面前——AI安全。最近,五名与安全相关的员工离职,其中包括两名最著名的员工,“超级对齐”团队的解散让OpenAI的安全问题再次被置于聚光灯下。《财富》杂志报道称,OpenA
 无需OpenAI数据,跻身代码大模型榜单!UIUC发布StarCoder-15B-Instruct
Jun 13, 2024 pm 01:59 PM
无需OpenAI数据,跻身代码大模型榜单!UIUC发布StarCoder-15B-Instruct
Jun 13, 2024 pm 01:59 PM
在软件技术的前沿,UIUC张令明组携手BigCode组织的研究者,近日公布了StarCoder2-15B-Instruct代码大模型。这一创新成果在代码生成任务取得了显着突破,成功超越CodeLlama-70B-Instruct,登上代码生成性能榜单之巅。 StarCoder2-15B-Instruct的独特之处在于其纯自对齐策略,整个训练流程公开透明,且完全自主可控。该模型通过StarCoder2-15B生成了数千个指令,响应对StarCoder-15B基座模型进行微调,无需依赖昂贵的人工标注数
 LLM全搞定!OmniDrive:集3D感知、推理规划于一体(英伟达最新)
May 09, 2024 pm 04:55 PM
LLM全搞定!OmniDrive:集3D感知、推理规划于一体(英伟达最新)
May 09, 2024 pm 04:55 PM
写在前面&笔者的个人理解这篇论文致力于解决当前多模态大语言模型(MLLMs)在自动驾驶应用中存在的关键挑战,即将MLLMs从2D理解扩展到3D空间的问题。由于自动驾驶车辆(AVs)需要针对3D环境做出准确的决策,这一扩展显得尤为重要。3D空间理解对于AV来说至关重要,因为它直接影响车辆做出明智决策、预测未来状态以及与环境安全互动的能力。当前的多模态大语言模型(如LLaVA-1.5)通常仅能处理较低分辨率的图像输入(例如),这是由于视觉编码器的分辨率限制,LLM序列长度的限制。然而,自动驾驶应用需
