

零样本6D物体姿态估计框架SAM-6D,向具身智能更进一步

物体姿态估计在许多现实世界应用中扮演着关键角色,如具身智能、机器人灵巧操作和增强现实等领域。
在这一领域中,最先受到关注的任务是实例级别 6D 姿态估计,其需要关于目标物体的带标注数据进行模型训练,使深度模型具有物体特定性,无法迁移应用到新物体上。后来研究热点逐步转向类别级别 6D 姿态估计,用于处理未见过的物体,但要求该物体属于已知的感兴趣类别。
而零样本 6D 姿态估计是一种更具泛化性的任务设置,给定任意物体的 CAD 模型,旨在场景中检测出该目标物体,并估计其 6D 姿态。尽管其具有重要意义,这种零样本的任务设置在物体检测和姿态估计方面都面临着巨大的挑战。

图 1. 零样本 6D 物体姿态估计任务示意
最近,分割一切模型 SAM [1] 备受关注,其出色的零样本分割能力令人瞩目。SAM 通过各种提示,如像素点、包围框、文本和掩膜等,实现高精度的分割,这也为零样本 6D 物体姿态估计任务提供了可靠的支撑, 展现了其前景的潜力。
因此,研究人员从跨维智能、香港中文大学(深圳)、华南理工大学联合提出了一种创新的零样本6D物体姿态估计框架SAM-6D。这项研究已被CVPR 2024收录。
- 论文链接: https://arxiv.org/pdf/2311.15707.pdf
- 代码链接: https://github.com/JiehongLin/SAM-6D
SAM-6D 通过两个步骤来实现零样本 6D 物体姿态估计,包括实例分割和姿态估计。相应地,给定任意目标物体,SAM-6D 利用两个专用子网络,即实例分割模型(ISM)和姿态估计模型(PEM),来从 RGB-D 场景图像中实现目标;其中,ISM 将 SAM 作为一个优秀的起点,结合精心设计的物体匹配分数来实现对任意物体的实例分割,PEM 通过局部到局部的两阶段点集匹配过程来解决物体姿态问题。SAM-6D 的总览如图 2 所示。
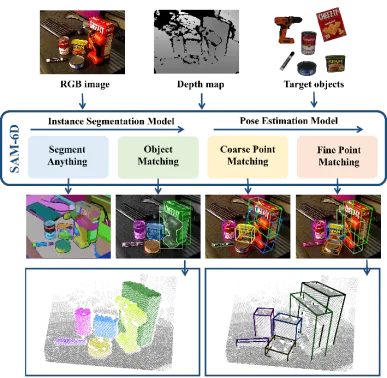
图 2. SAM-6D 总览图
总体来说,SAM-6D 的技术贡献可概括如下:
- SAM-6D 是一个创新的零样本 6D 姿态估计框架,通过给定任意物体的 CAD 模型,实现了从 RGB-D 图像中对目标物体进行实例分割和姿态估计,并在 BOP [2] 的七个核心数据集上表现优异。
- SAM-6D 利用分割一切模型的零样本分割能力,生成了所有可能的候选对象,并设计了一个新颖的物体匹配分数,以识别与目标物体对应的候选对象。
- SAM-6D 将姿态估计视为一个局部到局部的点集匹配问题,采用了一个简单但有效的 Background Token 设计,并提出了一个针对任意物体的两阶段点集匹配模型;第一阶段实现粗糙的点集匹配以获得初始物体姿态,第二阶段使用一个新颖的稀疏到稠密点集变换器以进行精细点集匹配,从而对姿态进一步优化。
实例分割模型 (ISM)
SAM-6D 使用实例分割模型(ISM)来检测和分割出任意物体的掩膜。
给定一个由 RGB 图像表征的杂乱场景,ISM 利用分割一切模型(SAM)的零样本迁移能力生成所有可能的候选对象。对于每个候选对象,ISM 为其计算一个物体匹配分数,以估计其与目标物体之间在语义、外观和几何方面的匹配程度。最后通过简单设置一个匹配阈值,即可识别出与目标物体所匹配的实例。
物体匹配分数的计算通过三个匹配项的加权求和得到:
语义匹配项 —— 针对目标物体,ISM 渲染了多个视角下的物体模板,并利用 DINOv2 [3] 预训练的 ViT 模型提取候选对象和物体模板的语义特征,计算它们之间的相关性分数。对前 K 个最高的分数进行平均即可得到语义匹配项分数,而最高相关性分数对应的物体模板视为最匹配模板。
外观匹配项 —— 对于最匹配模板,利用 ViT 模型提取图像块特征,并计算其与候选对象的块特征之间的相关性,从而获得外观匹配项分数,用于区分语义相似但外观不同的物体。
几何匹配项 —— 鉴于不同物体的形状和大小差异等因素,ISM 还设计了几何匹配项分数。最匹配模板对应的旋转与候选对象点云的平均值可以给出粗略的物体姿态,利用该姿态对物体 CAD 模型进行刚性变换并投影可以得到边界框。计算该边界框与候选边界框的交并比(IoU)则可得几何匹配项分数。
姿态估计模型 (PEM)
对于每个与目标物体匹配的候选对象,SAM-6D 利用姿态估计模型(PEM)来预测其相对于物体 CAD 模型的 6D 姿态。
将分割的候选对象和物体 CAD 模型的采样点集分别表示为 和
和 ,其中 N_m 和 N_o 表示它们点的数量;同时,将这两个点集的特征表示为
,其中 N_m 和 N_o 表示它们点的数量;同时,将这两个点集的特征表示为 和
和 ,C 表示特征的通道数。PEM 的目标是得到一个分配矩阵,用于表示从 P_m 到 P_o 之间的局部到局部对应关系;由于遮挡的原因,P_o 只部分与匹配 P_m,而由于分割不准确性和传感器噪声,P_m 也只部分与匹配 P_o。
,C 表示特征的通道数。PEM 的目标是得到一个分配矩阵,用于表示从 P_m 到 P_o 之间的局部到局部对应关系;由于遮挡的原因,P_o 只部分与匹配 P_m,而由于分割不准确性和传感器噪声,P_m 也只部分与匹配 P_o。
为了解决两个点集非重叠点的分配问题,ISM 为它们分别配备了 Background Token,记为  和
和  ,则可以基于特征相似性有效地建立局部到局部对应关系。具体来说,首先可以计算注意力矩阵如下:
,则可以基于特征相似性有效地建立局部到局部对应关系。具体来说,首先可以计算注意力矩阵如下:

接着可得分配矩阵

 和
和  分别表示沿着行和列的 softmax 操作,
分别表示沿着行和列的 softmax 操作, 表示一个常数。
表示一个常数。 中的每一行的值(除了首行),表示点集 P_m 中每个点 P_m 与背景及 P_o 中点的匹配概率,通过定位最大分数的索引,则可以找到与 P_m 匹配的点(包括背景)。
中的每一行的值(除了首行),表示点集 P_m 中每个点 P_m 与背景及 P_o 中点的匹配概率,通过定位最大分数的索引,则可以找到与 P_m 匹配的点(包括背景)。
一旦计算获得  ,则可以聚集所有匹配点对 {(P_m,P_o)} 以及它们的匹配分数,最终利用加权 SVD 计算物体姿态。
,则可以聚集所有匹配点对 {(P_m,P_o)} 以及它们的匹配分数,最终利用加权 SVD 计算物体姿态。
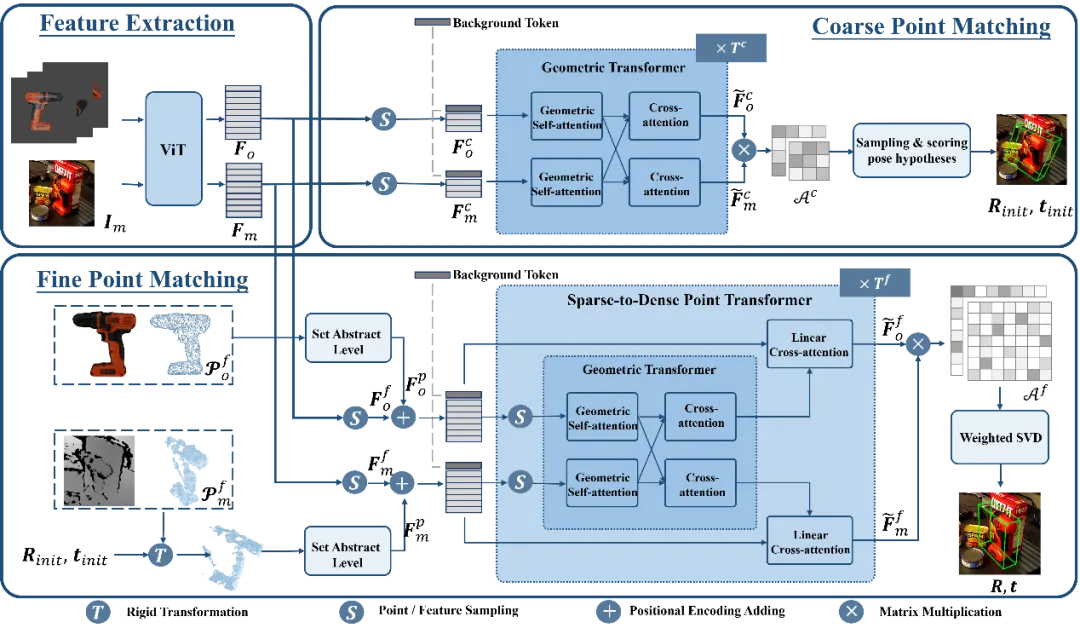
图 3. SAM-6D 中姿态估计模型 (PEM) 的示意图
利用上述基于 Background Token 的策略,PEM 中设计了两个点集匹配阶段,其模型结构如图 3 所示,包含了特征提取、粗略点集匹配和精细点集匹配三个模块。
粗糙点集匹配模块实现稀疏对应关系,以计算初始物体姿态,随后利用该姿态来对候选对象的点集进行变换,从而实现位置编码的学习。
精细点集匹配模块结合候选对象和目标物体的采样点集的位置编码,从而注入第一阶段的粗糙对应关系,并进一步建立密集对应关系以得到更精确的物体姿态。为了在这一阶段有效地学习密集交互,PEM 引入了一个新颖的稀疏到稠密点集变换器,它实现在密集特征的稀疏版本上的交互,并利用 Linear Transformer [5] 将增强后的稀疏特征扩散回密集特征。
实验结果
对于 SAM-6D 的两个子模型,实例分割模型(ISM)是基于 SAM 构建而成的,无需进行网络的重新训练和 finetune,而姿态估计模型(PEM)则利用 MegaPose [4] 提供的大规模 ShapeNet-Objects 和 Google-Scanned-Objects 合成数据集进行训练。
为验证其零样本能力,SAM-6D 在 BOP [2] 的七个核心数据集上进行了测试,包括了 LM-O,T-LESS,TUD-L,IC-BIN,ITODD,HB 和 YCB-V。表 1 和表 2 分别展示了不同方法在这七个数据集上的实例分割和姿态估计结果的比较。相较于其他方法,SAM-6D 在两个方法上的表现均十分优异,充分展现其强大的泛化能力。
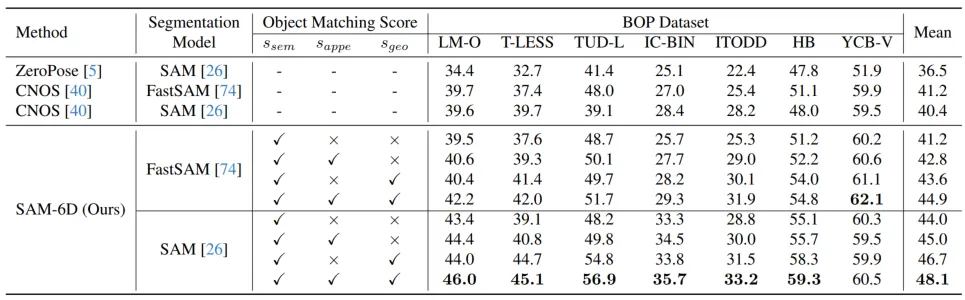
表 1. 不同方法在 BOP 七个核心数据集上的实例分割结果比较
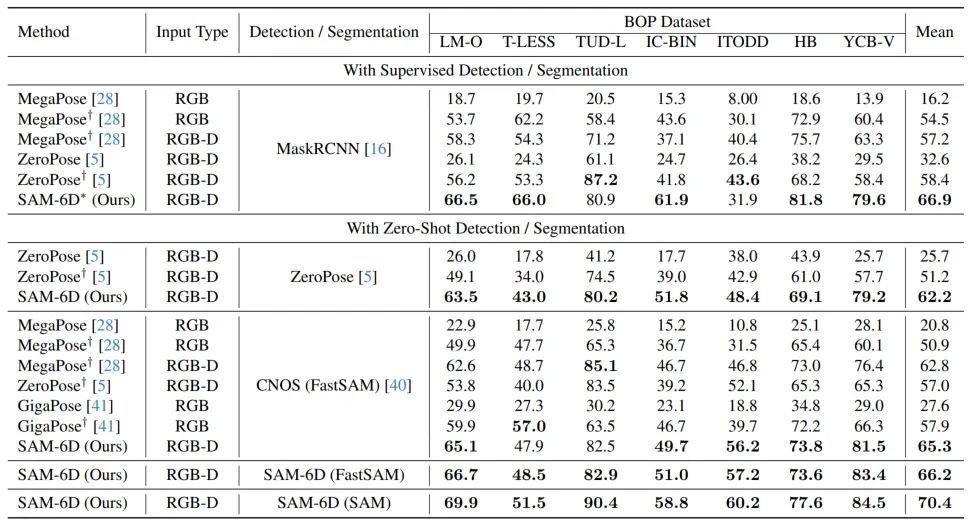
表 2. 不同方法在 BOP 七个核心数据集上的姿态估计结果比较
图 4 展示了 SAM-6D 在 BOP 七个数据集上的检测分割以及 6D 姿态估计的可视化结果,其中 (a) 和 (b) 分别为测试的 RGB 图像和深度图,(c) 为给定的目标物体,而 (d) 和 (e) 则分别为检测分割和 6D 姿态的可视化结果。
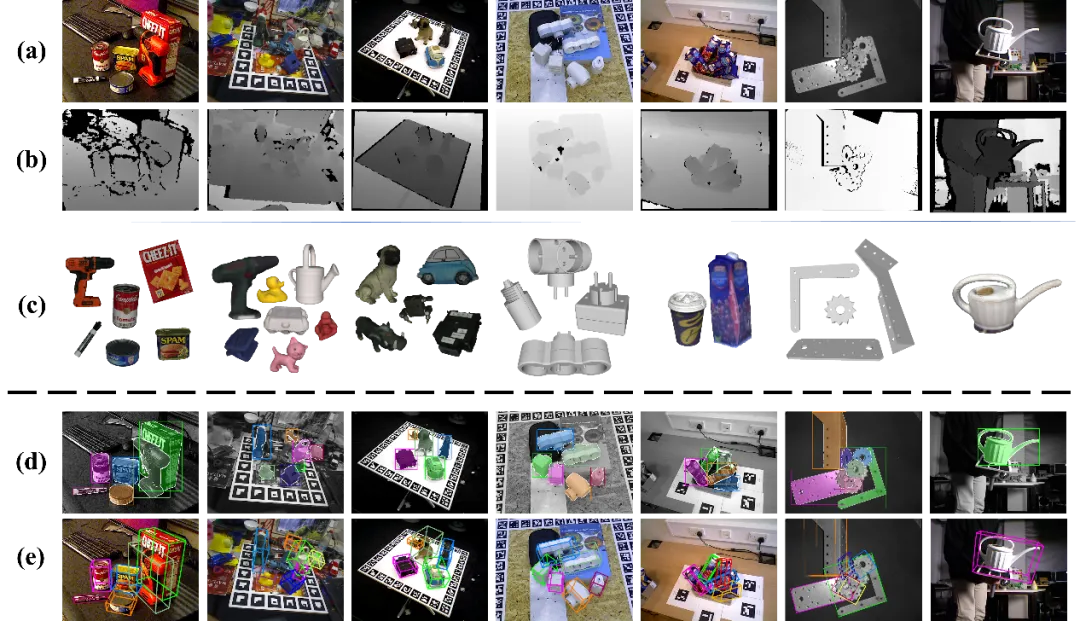
图 4. SAM-6D 在 BOP 的七个核心数据集上的可视化结果。
关于 SAM-6D 的更多实现细节, 欢迎阅读原论文.
以上是零样本6D物体姿态估计框架SAM-6D,向具身智能更进一步的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 centos关机命令行
Apr 14, 2025 pm 09:12 PM
centos关机命令行
Apr 14, 2025 pm 09:12 PM
CentOS 关机命令为 shutdown,语法为 shutdown [选项] 时间 [信息]。选项包括:-h 立即停止系统;-P 关机后关电源;-r 重新启动;-t 等待时间。时间可指定为立即 (now)、分钟数 ( minutes) 或特定时间 (hh:mm)。可添加信息在系统消息中显示。
 CentOS上GitLab的备份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS上GitLab的备份方法有哪些
Apr 14, 2025 pm 05:33 PM
CentOS系统下GitLab的备份与恢复策略为了保障数据安全和可恢复性,CentOS上的GitLab提供了多种备份方法。本文将详细介绍几种常见的备份方法、配置参数以及恢复流程,帮助您建立完善的GitLab备份与恢复策略。一、手动备份利用gitlab-rakegitlab:backup:create命令即可执行手动备份。此命令会备份GitLab仓库、数据库、用户、用户组、密钥和权限等关键信息。默认备份文件存储于/var/opt/gitlab/backups目录,您可通过修改/etc/gitlab
 如何检查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
如何检查CentOS HDFS配置
Apr 14, 2025 pm 07:21 PM
检查CentOS系统中HDFS配置的完整指南本文将指导您如何有效地检查CentOS系统上HDFS的配置和运行状态。以下步骤将帮助您全面了解HDFS的设置和运行情况。验证Hadoop环境变量:首先,确认Hadoop环境变量已正确设置。在终端执行以下命令,验证Hadoop是否已正确安装并配置:hadoopversion检查HDFS配置文件:HDFS的核心配置文件位于/etc/hadoop/conf/目录下,其中core-site.xml和hdfs-site.xml至关重要。使用
 CentOS上Zookeeper性能调优有哪些方法
Apr 14, 2025 pm 03:18 PM
CentOS上Zookeeper性能调优有哪些方法
Apr 14, 2025 pm 03:18 PM
在CentOS上对Zookeeper进行性能调优,可以从多个方面入手,包括硬件配置、操作系统优化、配置参数调整以及监控与维护等。以下是一些具体的调优方法:硬件配置建议使用SSD硬盘:由于Zookeeper的数据写入磁盘,强烈建议使用SSD以提高I/O性能。足够的内存:为Zookeeper分配足够的内存资源,避免频繁的磁盘读写。多核CPU:使用多核CPU,确保Zookeeper可以并行处理请
 CentOS上如何进行PyTorch模型训练
Apr 14, 2025 pm 03:03 PM
CentOS上如何进行PyTorch模型训练
Apr 14, 2025 pm 03:03 PM
在CentOS系统上高效训练PyTorch模型,需要分步骤进行,本文将提供详细指南。一、环境准备:Python及依赖项安装:CentOS系统通常预装Python,但版本可能较旧。建议使用yum或dnf安装Python3并升级pip:sudoyumupdatepython3(或sudodnfupdatepython3),pip3install--upgradepip。CUDA与cuDNN(GPU加速):如果使用NVIDIAGPU,需安装CUDATool
 CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
CentOS上PyTorch的GPU支持情况如何
Apr 14, 2025 pm 06:48 PM
在CentOS系统上启用PyTorchGPU加速,需要安装CUDA、cuDNN以及PyTorch的GPU版本。以下步骤将引导您完成这一过程:CUDA和cuDNN安装确定CUDA版本兼容性:使用nvidia-smi命令查看您的NVIDIA显卡支持的CUDA版本。例如,您的MX450显卡可能支持CUDA11.1或更高版本。下载并安装CUDAToolkit:访问NVIDIACUDAToolkit官网,根据您显卡支持的最高CUDA版本下载并安装相应的版本。安装cuDNN库:前
 docker原理详解
Apr 14, 2025 pm 11:57 PM
docker原理详解
Apr 14, 2025 pm 11:57 PM
Docker利用Linux内核特性,提供高效、隔离的应用运行环境。其工作原理如下:1. 镜像作为只读模板,包含运行应用所需的一切;2. 联合文件系统(UnionFS)层叠多个文件系统,只存储差异部分,节省空间并加快速度;3. 守护进程管理镜像和容器,客户端用于交互;4. Namespaces和cgroups实现容器隔离和资源限制;5. 多种网络模式支持容器互联。理解这些核心概念,才能更好地利用Docker。
 CentOS下PyTorch版本怎么选
Apr 14, 2025 pm 02:51 PM
CentOS下PyTorch版本怎么选
Apr 14, 2025 pm 02:51 PM
在CentOS下选择PyTorch版本时,需要考虑以下几个关键因素:1.CUDA版本兼容性GPU支持:如果你有NVIDIAGPU并且希望利用GPU加速,需要选择支持相应CUDA版本的PyTorch。可以通过运行nvidia-smi命令查看你的显卡支持的CUDA版本。CPU版本:如果没有GPU或不想使用GPU,可以选择CPU版本的PyTorch。2.Python版本PyTorch
