

用MoE横扫99个子任务!浙大等提出全新通用机器人策略GeRM

多任务机器人学习在应对多样化和复杂情景方面具有重要意义。然而,当前的方法受到性能问题和收集训练数据集的困难的限制。
这篇论文提出了GeRM(通用机器人模型),研究人员利用离线强化学习来优化数据利用策略,从演示和次优数据中学习,从而超越了人类演示的局限性。

作者:宋文轩,赵晗,丁鹏翔,崔灿,吕尚可,范亚凝,王东林
单位:西湖大学、浙江大学
论文地址:https://arxiv.org/abs/2403.13358
项目地址:https://songwxuan.github.io/GeRM/
之后采用基于Transformer的视觉-语言-动作模型来处理多模态输入并输出动作。
通过引入专家混合结构,GeRM实现了更快的推理速度和更高的整体模型容量,从而解决了强化学习参数量受限的问题,提高了多任务学习中的模型性能,同时控制了计算成本。
通过一系列实验证明,GeRM在所有任务中均优于其他方法,同时验证了其在训练和推理过程中的效率。
此外,研究人员还提供了QUARD-Auto数据集以支持训练,该数据集的构建遵循文中提出的数据自动化收集的新范式,该方法可以降低收集机器人数据的成本,推动多任务学习社区的进步。
主要贡献:
1. 首次提出了用于四足强化学习的混合专家模型,其在混合质量的数据上进行训练,从而具备习得最优策略的潜力。
2. 与现有方法相比,GeRM在只激活自身1/2参数的情况下展现出更高的成功率,激活了涌现能力,同时在训练过程中展现了更优的数据利用策略。
3.提出了一个全自动机器人数据集收集的范式,并收集了一个大规模开源数据集。
方法
GeRM网络结构如图1所示,包含示范数据和失败数据的视觉-语言输入,分别经过编码器和tokenizer后输入到8层混合专家结构的decoder中,并生成动作token,最终转化为离散的机器人动作数据并通过底层策略部署到机器人上,此外我们用强化学习的方式进行训练。
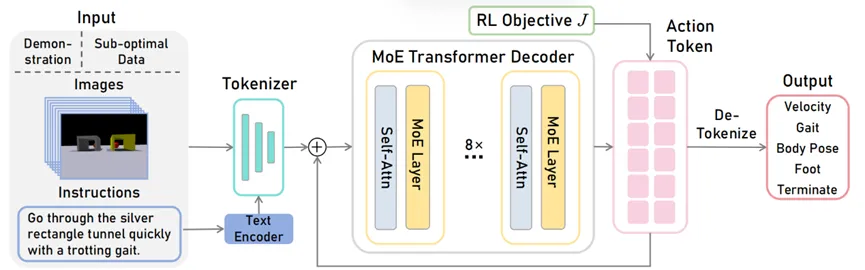
图1 GeRM网络结构图
GeRM Decoder是一个包含 Transformer Decoder架构模型,其中前馈网络(FFN)从一组 8 个不同的专家网络中选择。
在每一层,对于每一个标记,门控网络选择两个专家来处理token,并将它们的输出加权组合。
不同的专家擅长不同的任务/不同的动作维度,以解决不同场景中的问题,从而学习跨多个任务的通用模型。该架构扩大了网络参数量,同时保持计算成本基本不变。
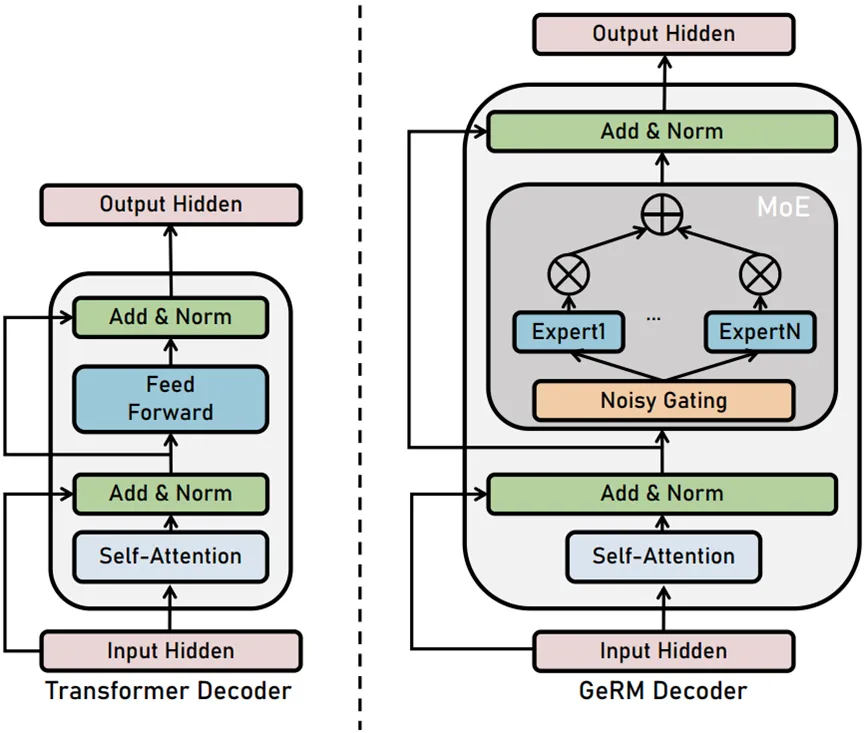
图2 Decoder结构图
我们提出了一个自动的范式来收集机器人多模态数据。通过这种方式,我们构建了一个大规模的机器人数据集QUARD-Auto,其中包含演示和次优数据的组合。它包括5个任务和99个子任务,总共有257k条轨迹。我们将进行开源以促进机器人社区发展。

表1 数据集介绍
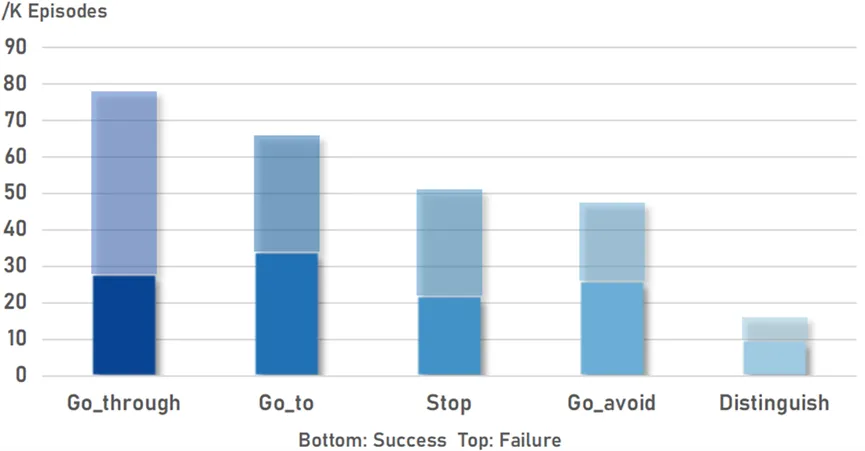
图3 数据量统计
实验
我们进行了一系列全面而可靠的实验,涵盖了所有 99 个子任务,每个子任务进行了 400 条轨迹的精心测试。
如表1所示,GeRM在所有任务中具有最高的成功率。与 RT-1 和其他GeRM 的变体相比,它有效地从混合质量的数据中学习,优于其他方法,并在多任务中展现出优越的能力。与此同时,MoE 模块通过在推理时激活部分参数来平衡计算成本和性能。
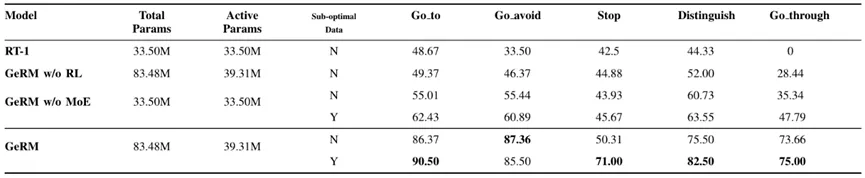
表2 多任务对比实验
GeRM表现出令人称赞的训练效率。与其他方法相比,GeRM 仅需极少的batch就获得了极低的Loss和较高的成功率,凸显了GeRM优化数据利用策略的能力。
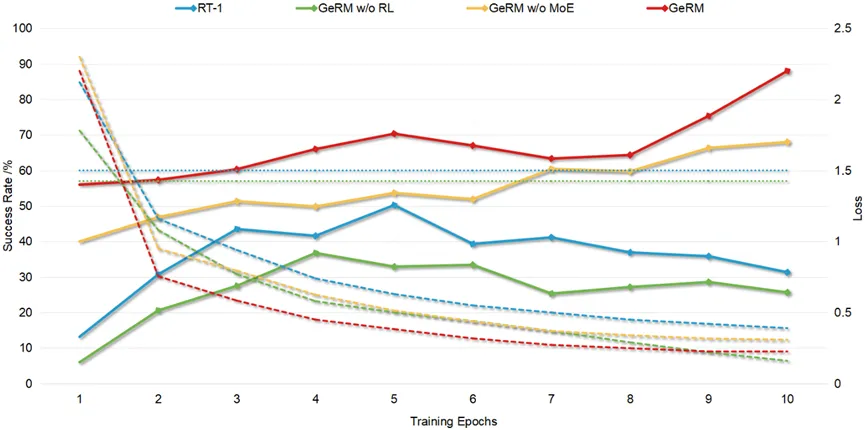
图4 成功率/Loss变化曲线
GeRM 在动态自适应路径规划方面展现出了涌现能力。如视频所示,四足机器人在初始位置视野受限,难以确定移动方向。为了避开障碍物,它随机选择向左转。
随后,在遇到错误的视觉输入后,机器人执行了大幅度的重新定向,以与原始视野之外的正确目标对齐。然后,它继续向目的地驶去,最终完成任务。
值得注意的是,这样的轨迹不属于我们的训练数据集分布之内。这表明 GeRM 在场景背景下的动态自适应路径规划方面具有涌现能力,即它能够根据视觉感知进行决策、规划未来路径,并根据需要改变下一步行动。
图5 涌现能力
以上是用MoE横扫99个子任务!浙大等提出全新通用机器人策略GeRM的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 跨链交易什么意思?跨链交易所有哪些?
Apr 21, 2025 pm 11:39 PM
跨链交易什么意思?跨链交易所有哪些?
Apr 21, 2025 pm 11:39 PM
支持跨链交易的交易所有:1. Binance,2. Uniswap,3. SushiSwap,4. Curve Finance,5. Thorchain,6. 1inch Exchange,7. DLN Trade,这些平台通过各种技术支持多链资产交易。
 WorldCoin(WLD)价格预测2025-2031:到2031年WLD会达到4美元吗?
Apr 21, 2025 pm 02:42 PM
WorldCoin(WLD)价格预测2025-2031:到2031年WLD会达到4美元吗?
Apr 21, 2025 pm 02:42 PM
WorldCoin(WLD)凭借其独特的生物识别验证和隐私保护机制,在加密货币市场中脱颖而出,吸引了众多投资者的目光。 WLD凭借其创新技术,特别是结合OpenAI人工智能技术,在众多山寨币中表现突出。但未来几年,数字资产的走势如何呢?让我们一起预测WLD的未来价格。 2025年WLD价格预测预计2025年WLD将实现显着增长。市场分析显示,WLD平均价格可能达到1.31美元,最高可能触及1.36美元。然而,在熊市情况下,价格可能跌至0.55美元左右。这一增长预期主要源于WorldCoin2.
 对于加密货币行业来说,'黑色星期一抛售”是艰难的一天
Apr 21, 2025 pm 02:48 PM
对于加密货币行业来说,'黑色星期一抛售”是艰难的一天
Apr 21, 2025 pm 02:48 PM
加密货币市场暴跌引发投资者恐慌,Dogecoin(Doge)成为重灾区之一。其价格大幅下挫,去中心化金融(DeFi)总价值锁定(TVL)也出现显着下降。 “黑色星期一”的抛售潮席卷加密货币市场,Dogecoin首当其冲。其DeFiTVL跌至2023年水平,币价在过去一个月内下跌23.78%。 Dogecoin的DeFiTVL降至272万美元的低点,主要原因是SOSO价值指数下跌26.37%。其他主要DeFi平台,如无聊的Dao和Thorchain,TVL也分别下降了24.04%和20.
 币圈杠杆交易所排名 币圈十大杠杆交易所APP最新推荐
Apr 21, 2025 pm 11:24 PM
币圈杠杆交易所排名 币圈十大杠杆交易所APP最新推荐
Apr 21, 2025 pm 11:24 PM
2025年在杠杆交易、安全性和用户体验方面表现突出的平台有:1. OKX,适合高频交易者,提供最高100倍杠杆;2. Binance,适用于全球多币种交易者,提供125倍高杠杆;3. Gate.io,适合衍生品专业玩家,提供100倍杠杆;4. Bitget,适用于新手及社交化交易者,提供最高100倍杠杆;5. Kraken,适合稳健型投资者,提供5倍杠杆;6. Bybit,适用于山寨币探索者,提供20倍杠杆;7. KuCoin,适合低成本交易者,提供10倍杠杆;8. Bitfinex,适合资深玩
 Aavenomics是修改AAVE协议令牌并介绍令牌回购的建议,已达到法定人数
Apr 21, 2025 pm 06:24 PM
Aavenomics是修改AAVE协议令牌并介绍令牌回购的建议,已达到法定人数
Apr 21, 2025 pm 06:24 PM
Aavenomics是修改AAVE协议令牌并引入令牌回购的提议,已为AAVEDAO实现了一个法定人数。AAVE连锁计划(ACI)创始人马克·泽勒(MarcZeller)在X上宣布了这一点,并指出它标志着该协议的新时代。AAVE连锁倡议(ACI)创始人MarcZeller在X上宣布,Aavenomics提案包括修改AAVE协议令牌和引入令牌回购,已为AAVEDAO实现了法定人数。根据Zeller的说法,这标志着该协议的新时代。AaveDao成员以压倒性的投票支持该提议,即在周三以每周100
 十大加密货币交易所平台 世界最大的数字货币交易所榜单
Apr 21, 2025 pm 07:15 PM
十大加密货币交易所平台 世界最大的数字货币交易所榜单
Apr 21, 2025 pm 07:15 PM
在当今的加密货币市场中,交易所扮演着至关重要的角色,它们不仅是投资者进行买卖交易的平台,更是市场流动性和价格发现的重要来源。全球最大的虚拟货币交易所排行前十,这些交易所不仅在交易量上遥遥领先,而且在用户体验、安全性和创新服务方面也各有千秋。排行榜首的交易所通常拥有庞大的用户基础和广泛的市场影响力,它们的交易量和资产种类往往是其他交易所难以企及的。
 混合型区块链交易平台有哪些
Apr 21, 2025 pm 11:36 PM
混合型区块链交易平台有哪些
Apr 21, 2025 pm 11:36 PM
选择加密货币交易所的建议:1. 流动性需求,优先选择币安、Gate.io或OKX,因其订单深度与抗波动能力强。2. 合规与安全,Coinbase、Kraken、Gemini具备严格监管背书。3. 创新功能,KuCoin的软质押和Bybit的衍生品设计适合进阶用户。
 币圈行情实时数据免费平台推荐前十名发布
Apr 22, 2025 am 08:12 AM
币圈行情实时数据免费平台推荐前十名发布
Apr 22, 2025 am 08:12 AM
适合新手的加密货币数据平台有CoinMarketCap和非小号。1. CoinMarketCap提供全球加密货币实时价格、市值、交易量排名,适合新手与基础分析需求。2. 非小号提供中文友好界面,适合中文用户快速筛选低风险潜力项目。
