

ORB-SLAM2初学笔记

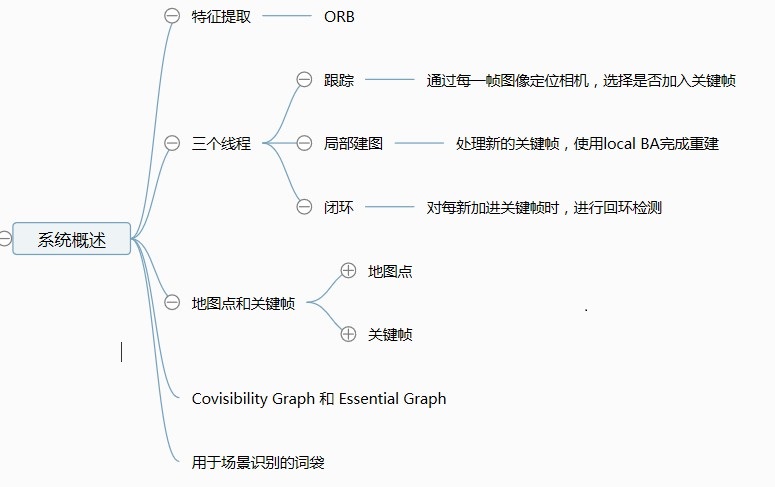
ORB-SLAM主要分为三个线程进行:Tracking、LocalMapping和LoopClosing
三个线程分别存放在对应的三个文件中,分别是Tracking.cpp、LocalMapping.cpp和LoopClosing.cpp文件中。
(1)跟踪(Tracking)
这一部分主要工作是从图像中提取ORB特征,根据上一帧进行姿态估计,或者进行通过全局重定位初始化位姿,然后跟踪已经重建的局部地图,优化位姿,再根据一些规则确定新的关键帧。
(2)建图(LocalMapping)
这一部分主要完成局部地图构建。包括对关键帧的插入,验证最近生成的地图点并进行筛选,然后生成新的地图点,使用局部捆集调整(Local BA),最后再对插入的关键帧进行筛选,去除多余的关键帧。
(3)闭环检测(LoopClosing)
这一部分主要分为两个过程,分别是闭环探测和闭环校正。闭环检测先使用WOB进行探测,然后通过Sim3算法计算相似变换。闭环校正,主要是闭环融合和Essential Graph的图优化。
以上是ORB-SLAM2初学笔记的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 如何在macOS上将apscheduler定时任务配置为服务?
Apr 01, 2025 pm 06:09 PM
如何在macOS上将apscheduler定时任务配置为服务?
Apr 01, 2025 pm 06:09 PM
在macOS上将apscheduler定时任务配置为服务在macOS平台上,如果你想将apscheduler定时任务配置为一个服务,类似于ngin...
 c语言多线程的四种实现方式
Apr 03, 2025 pm 03:00 PM
c语言多线程的四种实现方式
Apr 03, 2025 pm 03:00 PM
语言多线程可以大大提升程序效率,C 语言中多线程的实现方式主要有四种:创建独立进程:创建多个独立运行的进程,每个进程拥有自己的内存空间。伪多线程:在一个进程中创建多个执行流,这些执行流共享同一内存空间,并交替执行。多线程库:使用pthreads等多线程库创建和管理线程,提供了丰富的线程操作函数。协程:一种轻量级的多线程实现,将任务划分成小的子任务,轮流执行。
 web.xml怎么打开
Apr 03, 2025 am 06:51 AM
web.xml怎么打开
Apr 03, 2025 am 06:51 AM
要打开 web.xml 文件,可以使用以下方法:使用文本编辑器(如记事本或 TextEdit)使用集成开发环境(如 Eclipse 或 NetBeans)使用命令行编辑命令(Windows:notepad web.xml;Mac/Linux:open -a TextEdit web.xml)
 Linux系统自带Python解释器能删除吗?
Apr 02, 2025 am 07:00 AM
Linux系统自带Python解释器能删除吗?
Apr 02, 2025 am 07:00 AM
关于Linux系统自带Python解释器的删除问题许多Linux发行版在安装时会预装Python解释器,它并非通过软件包管理器�...
 Linux最好使用的是什么?
Apr 03, 2025 am 12:11 AM
Linux最好使用的是什么?
Apr 03, 2025 am 12:11 AM
Linux最适合用作服务器管理、嵌入式系统和桌面环境。1)在服务器管理中,Linux用于托管网站、数据库和应用程序,提供稳定性和可靠性。2)在嵌入式系统中,Linux因其灵活性和稳定性被广泛应用于智能家居和汽车电子系统。3)在桌面环境中,Linux提供了丰富的应用和高效的性能。
 Debian Hadoop 兼容性怎样
Apr 02, 2025 am 08:42 AM
Debian Hadoop 兼容性怎样
Apr 02, 2025 am 08:42 AM
DebianLinux以其稳定性和安全性着称,广泛应用于服务器、开发和桌面环境。虽然目前缺乏关于Debian与Hadoop直接兼容性的官方说明,但本文将指导您如何在Debian系统上部署Hadoop。 Debian系统需求:在开始Hadoop配置前,请确保您的Debian系统满足Hadoop的最低运行要求,这包括安装必要的Java运行时环境(JRE)和Hadoop软件包。 Hadoop部署步骤:下载并解压Hadoop:从ApacheHadoop官方网站下载您需要的Hadoop版本,并将其解
 Debian Strings能否兼容多种浏览器
Apr 02, 2025 am 08:30 AM
Debian Strings能否兼容多种浏览器
Apr 02, 2025 am 08:30 AM
“DebianStrings”并非标准术语,其具体含义尚不明确。本文无法直接评论其浏览器兼容性。然而,如果“DebianStrings”指的是在Debian系统上运行的Web应用,则其浏览器兼容性取决于应用本身的技术架构。大多数现代Web应用都致力于跨浏览器兼容性。这依赖于遵循Web标准,并使用兼容性良好的前端技术(如HTML、CSS、JavaScript)以及后端技术(如PHP、Python、Node.js等)。为了确保应用与多种浏览器兼容,开发者通常需要进行跨浏览器测试,并使用响应式
