

Gaussian-LIC:首个多传感器融合3DGS-SLAM系统(浙大&TUM)

多传感器与3DGS的结合
“基于3D空间中的采样进行计算密集型SLAM任务所需的实时能力”的隐式表达法需要基于NeRF-based SLAM方法。3DGS以其快速的渲染速度和优越的视觉质量而引人注目。作为一种明确且可以解释的表达法,3DGS使得场景编辑变得简单,有利于众多下游任务的执行。
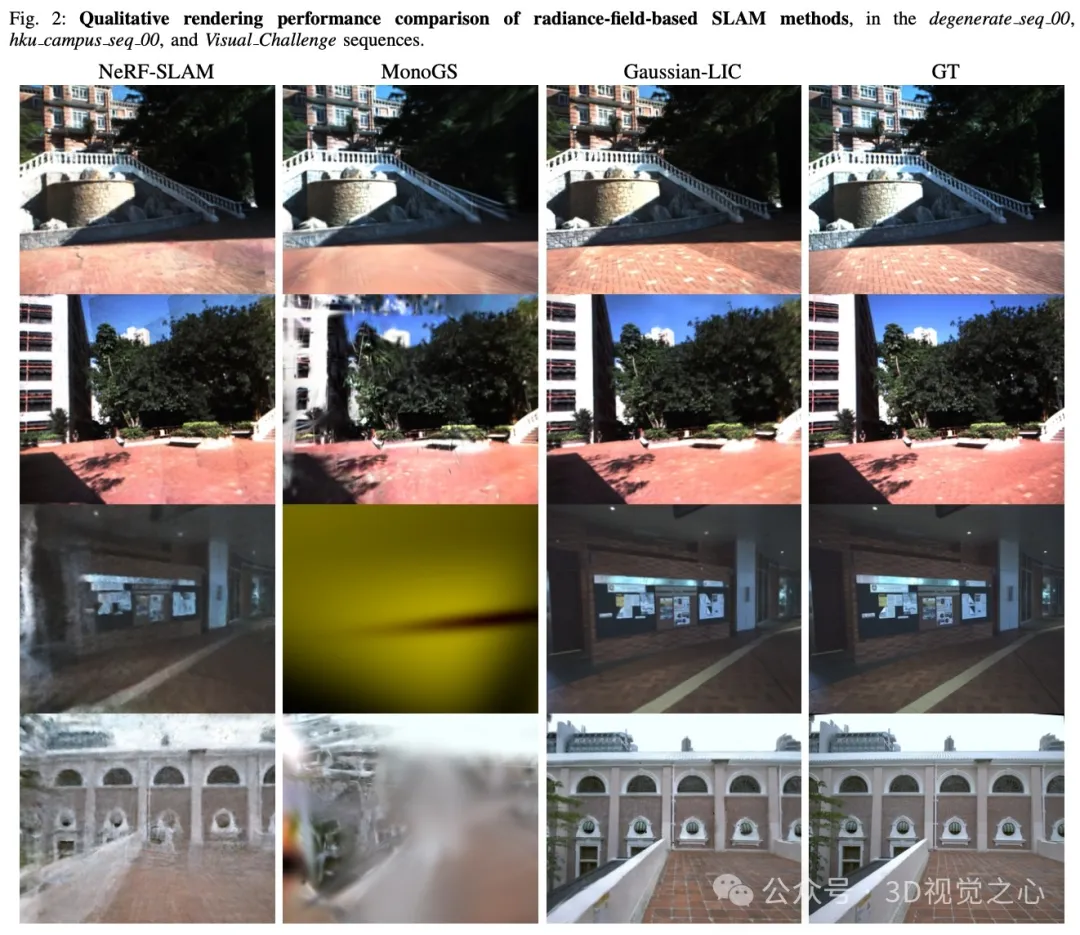
现有的基于辐射场的SLAM系统,主要在光照良好的小规模室内环境中进行测试,并使用顺序RGB-D或RGB输入获得令人满意的结果。当这些方法扩展到具有挑战性的大规模不受控制的室外场景时将会遇到困难,例如具有挑战性的光照条件、杂乱的背景和高度动态的自身运动。
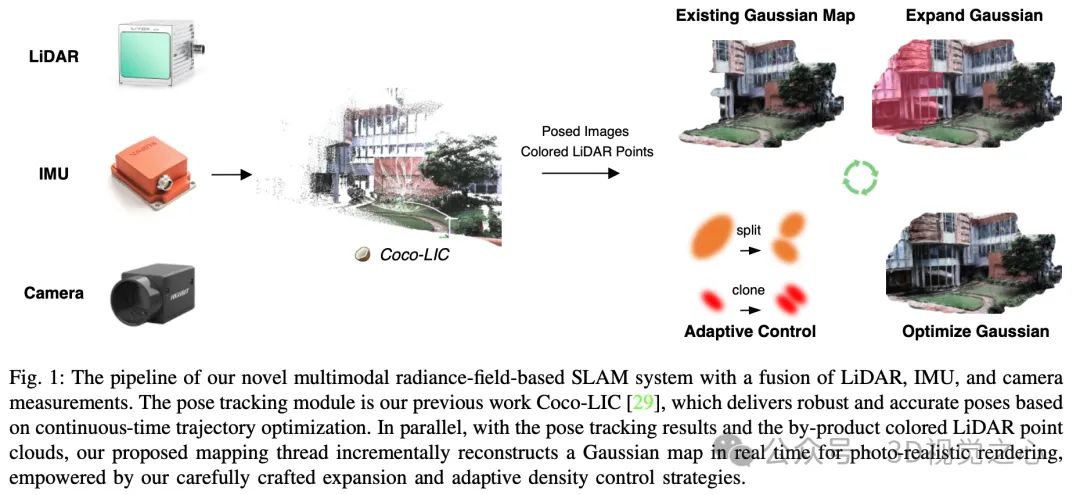
使用Gaussian-LIC 通过融合来自多个传感器的数据,包括3D激光雷达、IMU和相机(称为ALIC),在不受控制的室外场景中
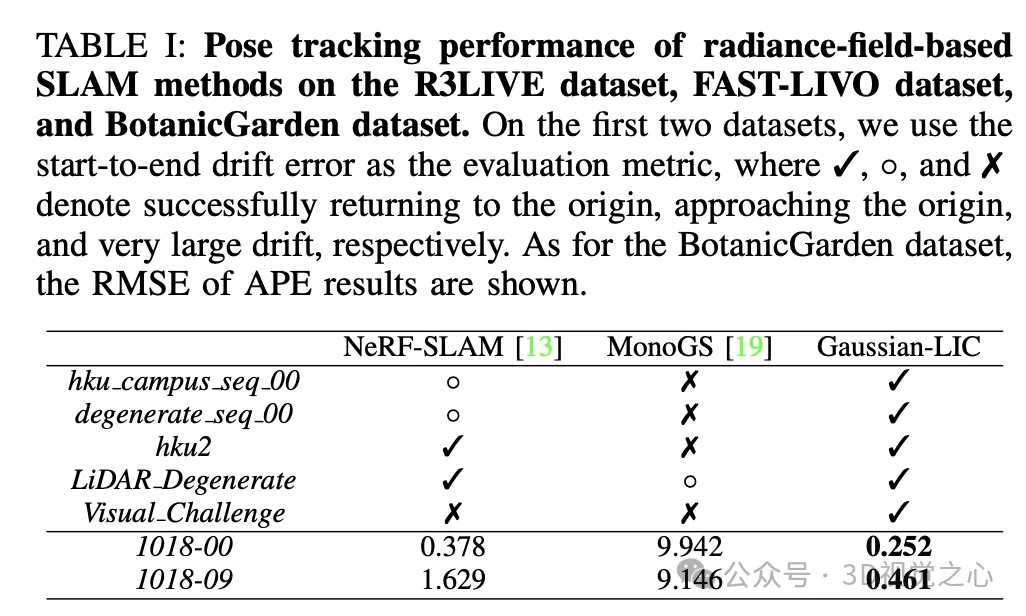
- 首个基于激光雷达惯性相机融合的3DGS-SLAM系统,实现了高度精确的姿态跟踪和逼真的在线地图构建。
- 利用顺序着色激光雷达点云作为先验,以在线方式重建高斯地图。利用精心设计的一系列策略,逐步扩展高斯地图并自适应地控制其密度,以实现高效率和准确性。
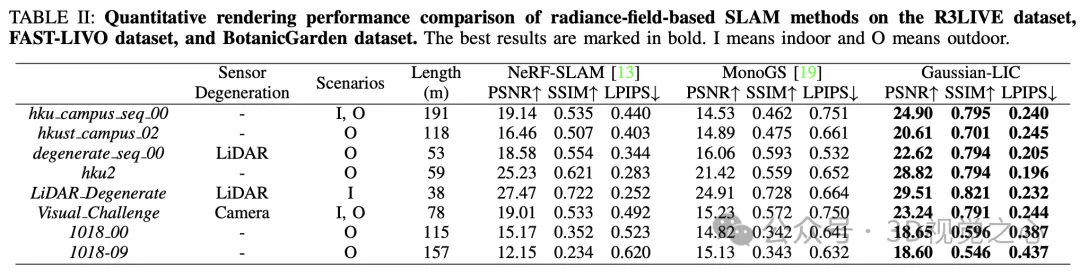
- 在室内外场景中经过广泛验证,展示了在逼真地图制作方面的最新性能。在恶劣条件下表现出鲁棒性,包括高度动态运动、低照明和缺乏几何结构和视觉纹理。
具体方法
如图1所示是LIC-SLAM系统流程。
3DGS的表示
将场景表示为各向异性的3D高斯集合,每个高斯的方差:

将3D高斯投影到图像平面上,获得2D高斯分布:
投影获得的2D高斯通过不透明度加权方程影响像素:

渲染轮廓图像以确定像素是否包含了足够的来自高斯地图的信息:

LiDAR-IMU-Camera里程计
里程计采用了先前的工作Coco-LIC作为跟踪前端,一个连续时间紧密耦合的激光雷达惯性摄像头测距系统。通过集成三种互补的传感器,Gaussian-LIC实现了强大、实时和高精度的姿态估计,从而促进了整个SLAM系统的运行。
每当最新的 (本文中为0.1秒)内的激光雷达惯性摄像头数据被累积时,会基于因子图高效地优化该时间间隔内的轨迹:
- 激光雷达点云到地图
- 图像到地图的视觉因子
- IMU因子
- 偏差因子
在时间间隔内我们仅利用最新的图像进行优化。
Gaussian-LIC维护一个以0.1米分辨率存储在体素中的全局激光雷达地图。在优化当前时间间隔内的轨迹后,为了提高效率,仅将该时间段内四分之一的激光雷达点转换为世界坐标并附加到体素中,以确保每个体素中的激光雷达点之间的距离应大于0.05米,以减少冗余。对于成功附加的激光雷达点,将它们投影到最新的图像上,并通过查询像素值为其着色。随后,它们与估计的相机姿态的最新图像一起发送到映射线程,被视为一帧。
基于3DGS的逼真建图
随着持续输入:估计的相机姿态、无畸变图像、着色的激光雷达点,建图模块逐步构建和优化高斯地图,主要分4步:
- 初始化:利用在第一个时间间隔内接收到的所有激光雷达点来创建新的高斯分布。为了减轻混叠伪影,我们为距离更近的高斯分布分配较小的尺度,而对于远离图像平面的高斯分布则分配较大的尺度:

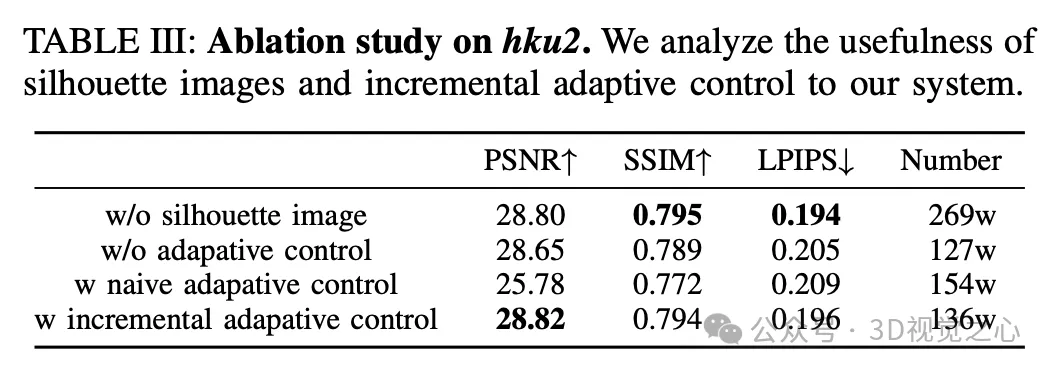
- 扩展:通常情况下,接收到的每帧画面都会捕捉到新观察区域的几何和外观。为了避免重复或极其相似的信息冗余,首先根据方程(6)从当前图像视图中渲染出一个轮廓图像,并生成一个掩码,以选择当前高斯地图中不可靠的像素,并倾向于观察新区域,只有能够投影到所选像素上的激光雷达点才会被利用:

- 优化:使用所有接收到的图像进行优化对于我们的在线增量映射系统来说在计算上是不可行的,因此将每五帧图像视为一个关键帧。为了保持有界的计算复杂度以提高效率,我们选择 个活跃的关键帧来优化高斯地图,包括第一个和最后一个关键帧,以及其他随机选择的 个关键帧,避免了灾难性遗忘问题,并保持了全局地图的几何一致性。我们随机打乱所选的 个关键帧,并逐个迭代每个关键帧,通过最小化重新渲染损失来优化地图:

- 自适应控制:激光雷达扫描可能无法覆盖整个场景,特别是在无边界的室外环境中。因此需要执行自适应控制以在单位体积内密集化高斯地图。原始策略在固定间隔处理具有较大梯度的高斯分布,而在增量模式下,由于它们通常尚未收敛,最近添加的高斯分布可能会由于具有较大梯度而被错误地克隆或分裂。解决方法是将现有的高斯分布分类为稳定和不稳定两类,并只对稳定的高斯分布进行密集化。
实验
总结和讨论
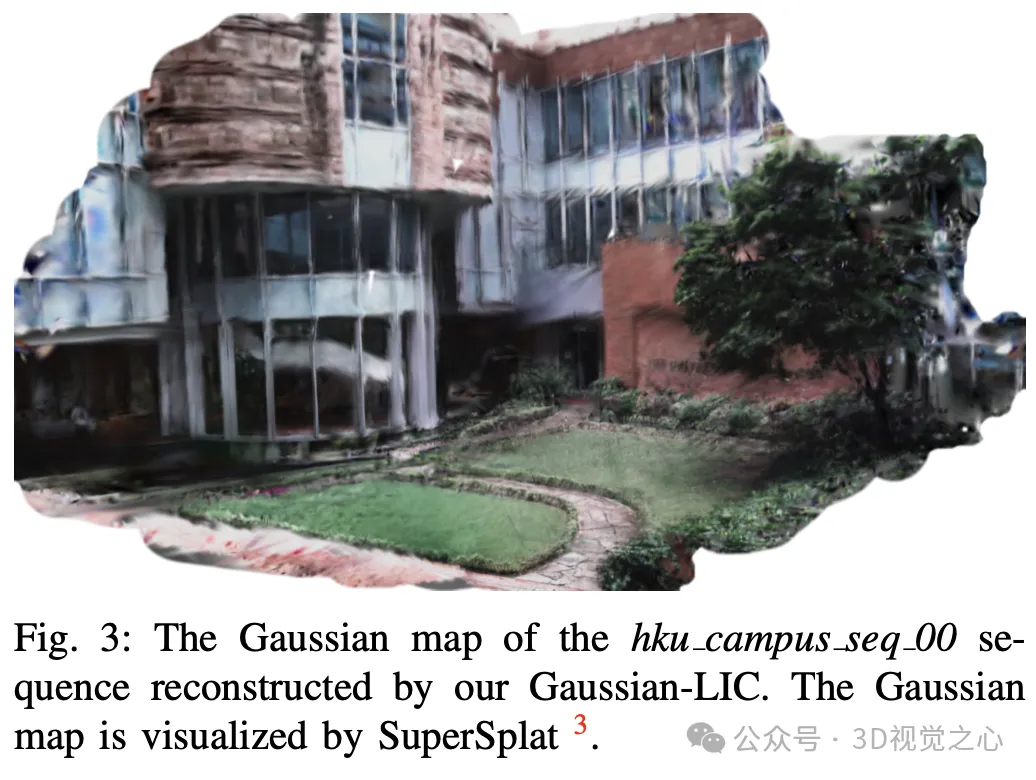
Gaussian-LIC 是一种新颖的LiDAR-惯性-相机辐射场SLAM系统,实现了高度准确的跟踪、具有3D高斯喷溅的逼真在线重建的双重功能。由高效的LiDAR-惯性-相机里程计产生的世界坐标中的着色LiDAR点被用作良好的先验,以辅助高斯地图的增量建立,在室内和室外场景中具有显著更好的泛化能力。
改进的空间:
- 尝试去除地图中非必要的高斯分布。
- 支持各种激光雷达,目前只尝试用固态激光雷达。
- 相机的自动曝光和运动模糊,影响逼真地图的视觉质量。
以上是Gaussian-LIC:首个多传感器融合3DGS-SLAM系统(浙大&TUM)的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 Wow Awesome!三星 Galaxy Ring 体验:2999 元的真 · 智能戒指
Jul 19, 2024 pm 02:31 PM
Wow Awesome!三星 Galaxy Ring 体验:2999 元的真 · 智能戒指
Jul 19, 2024 pm 02:31 PM
三星在7月17日正式发布了国行版的三星GalaxyRing,定价2999元。GalaxyRing的真机,真就是2024版的"WowAwesome,这是我独享的moment"。它是近几年除苹果VisionPro之外,让我们感觉最新鲜的电子产品(虽然听起来像是在立flag)。(图中,左右两边的戒指,就是GalaxyRing↑)三星GalaxyRing规格(国行官网数据):ZephyrRTOS系统,8MB存储;10ATM防水+IP68;电池容量18mAh到23.5mAh(不同尺码的
 升级全面屏!iPhone SE4 提前至 9 月
Jul 24, 2024 pm 12:56 PM
升级全面屏!iPhone SE4 提前至 9 月
Jul 24, 2024 pm 12:56 PM
最近微博上爆料了关于iPhoneSE4的新消息,消息称iPhoneSE4的后盖工艺和iPhone16标准版完全一样,也就是说,iPhoneSE4会采用玻璃背板,并搭配直屏直边的设计。消息称iPhoneSE4将会提前至今年9月发布,也就是很有可能会和iPhone16同时亮相。1.根据曝光的渲染图可见,iPhoneSE4正面设计与iPhone13相近,刘海屏上设置有前置摄像头和FaceID传感器。背面采用类似iPhoneXr的布局,但仅配置一颗摄像头,并未设有整体摄像模组。
 手机1英寸传感器到底有多大 其实比相机的1英寸还大
May 08, 2024 pm 06:40 PM
手机1英寸传感器到底有多大 其实比相机的1英寸还大
May 08, 2024 pm 06:40 PM
昨天的文章里没提“传感器尺寸”,没想到大家原来有这么多误解……1英寸到底是多少?因为一些历史遗留问题*,无论是相机还是手机,传感器对角线长度中的“1英寸”都不是25.4mm。*涉及到真空管,这里不做展开,有点类似马屁股决定铁轨宽度。为了避免误读,更严谨的写法是“1.0型”或者“Type1.0”。并且,当传感器尺寸小于1/2型时,1型=18mm;而在传感器尺寸大于等于1/2型时,1型=
 相机与激光雷达是怎么标定的?一览行业所有主流的标定工具
Mar 22, 2024 pm 02:01 PM
相机与激光雷达是怎么标定的?一览行业所有主流的标定工具
Mar 22, 2024 pm 02:01 PM
相机和激光雷达的标定是许多任务中至关重要的基础工作,标定的准确度直接影响了后续方案融合的效果上限。随着许多自动驾驶和机器人公司投入了大量的人力和物力来不断提高标定的准确性,今天我们将为大家介绍一些常见的Camera-Lidar标定工具箱,建议大家收藏起来!1.Libcbdetect一次拍摄多棋盘格检测:https://www.cvlibs.net/software/libcbdetect/使用MATLAB编写的算法能够自动提取角点并将它们精确到亚像素级别,并将这些角点组合成矩形棋盘状的图案。该算
 AirPods Pro 和 AirPods 3:如何更改力传感器控件
Apr 13, 2023 am 11:43 AM
AirPods Pro 和 AirPods 3:如何更改力传感器控件
Apr 13, 2023 am 11:43 AM
AirPods Pro具有出色的功能,例如降噪和采用入耳式设计的透明模式。为了在这些功能和其他功能之间切换,AirPods Pro(和 AirPods 3)杆中的力传感器可提供轻松控制。继续阅读以了解如何更改 AirPods 控件,包括按压速度、按压持续时间以及左右力传感器的功能等等。AirPods gen 1 和 2使用耳塞上的双击进行控制。但AirPods Pro 和 AirPods 3使用内置在每个耳塞杆中的压力传感器。我们将介绍三种在降噪、透明度和关闭之间切换的方法,如何自定义力度传感器
 国产传感器天花板!OV50K40传感器详解
Mar 20, 2024 am 09:56 AM
国产传感器天花板!OV50K40传感器详解
Mar 20, 2024 am 09:56 AM
国产制造商豪威发布了新CMOS——OV50K40传感器。这款传感器是全球首个采用TheiaCel技术的智能手机图像传感器,其独特的设计使得单次曝光能够实现接近人眼级别的动态范围。OV50K40传感器拥有5000万像素的原生分辨率,并采用了1/1.3英寸的大底面积,每个像素的面积达到了1.2微米。此外,它还支持像素四合一输出,即将四个像素合并成一个,输出1250万像素的图像,从而带来更强大的感光能力。这款传感器的帧率支持120帧/秒和60帧/秒(HDR),可实现完整的5000万像素B
 为什么有人认为安卓拍照可以吊打苹果?答案就这么直接
Mar 25, 2024 am 09:50 AM
为什么有人认为安卓拍照可以吊打苹果?答案就这么直接
Mar 25, 2024 am 09:50 AM
在讨论安卓手机的拍照功能时,大多数用户对其给予了肯定,与苹果手机相比,用户普遍认为安卓手机的拍照表现更出色。这一观点并非毫无根据,实际原因也是显而易见的。高端安卓手机在硬件配置方面具有较大的竞争优势,尤其是摄像头传感器方面。许多高端安卓手机采用最新的、顶级的摄像头传感器,这些传感器在像素数、光圈大小和光学变焦能力等方面往往比同期发布的iPhone更为突出。这种优势使得安卓手机在拍摄照片和录制视频时能够提供更高质量的成像效果,满足用户对于摄影和摄像的需求。因此,硬件配置的竞争优势成为了安卓手机吸引
 小米 15 系列全代号曝光:Dada、Haotian、Xuanyuan
Aug 22, 2024 pm 06:47 PM
小米 15 系列全代号曝光:Dada、Haotian、Xuanyuan
Aug 22, 2024 pm 06:47 PM
小米15系列预计将于10月份正式发布,其全系列代号已在外媒MiCode代码库中曝光。其中,旗舰级小米15Ultra代号为"Xuanyuan"(意为"轩辕"),此名源自中国神话中的黄帝,象征着尊贵。小米15的代号为"Dada",而小米15Pro则以"Haotian"(意为"昊天")为名。小米15SPro内部代号为"dijun",暗指《山海经》创世神帝俊。小米15Ultra系列涵盖
