

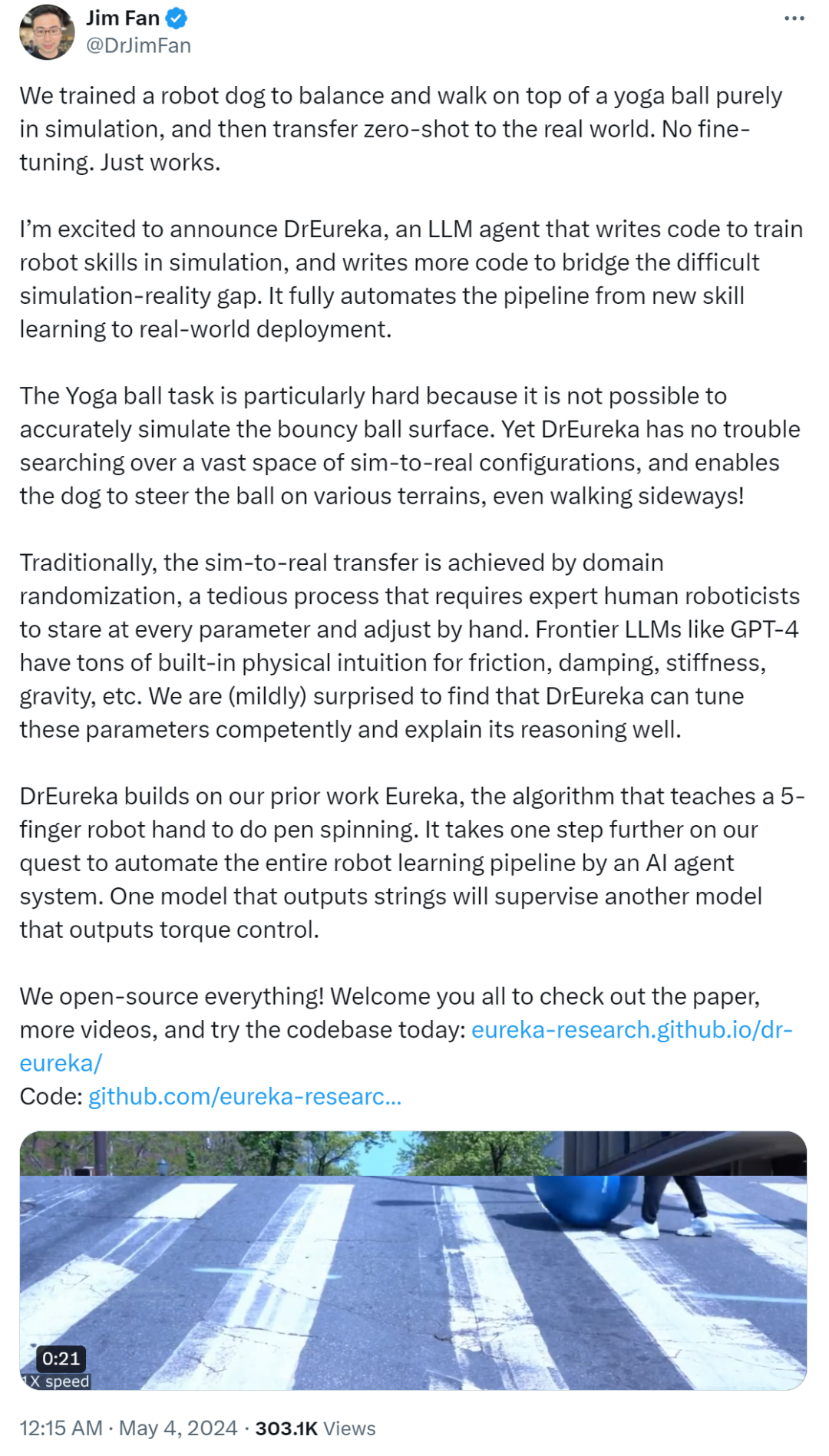
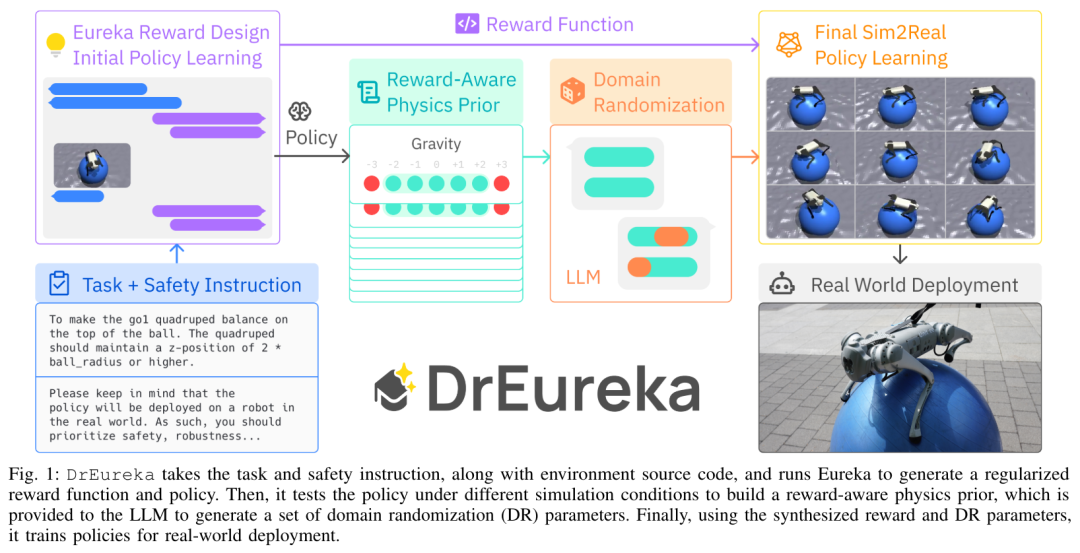
瑜伽球上遛「狗」!入选英伟达十大项目之一的Eureka有了新突破

git
工程
dreureka

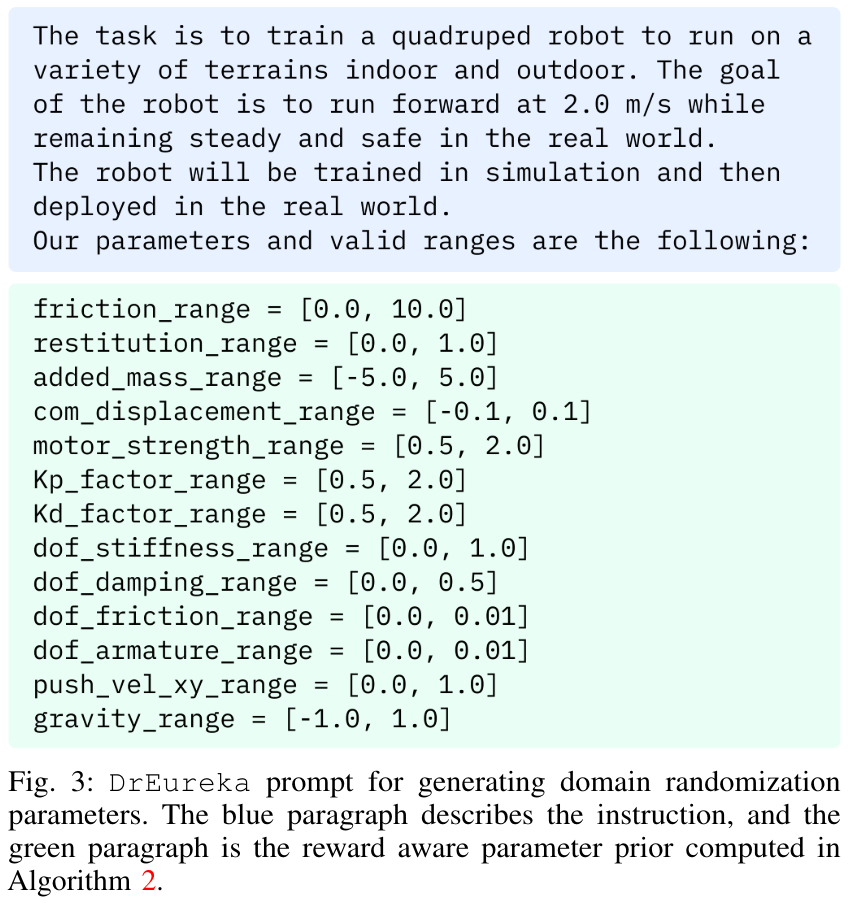
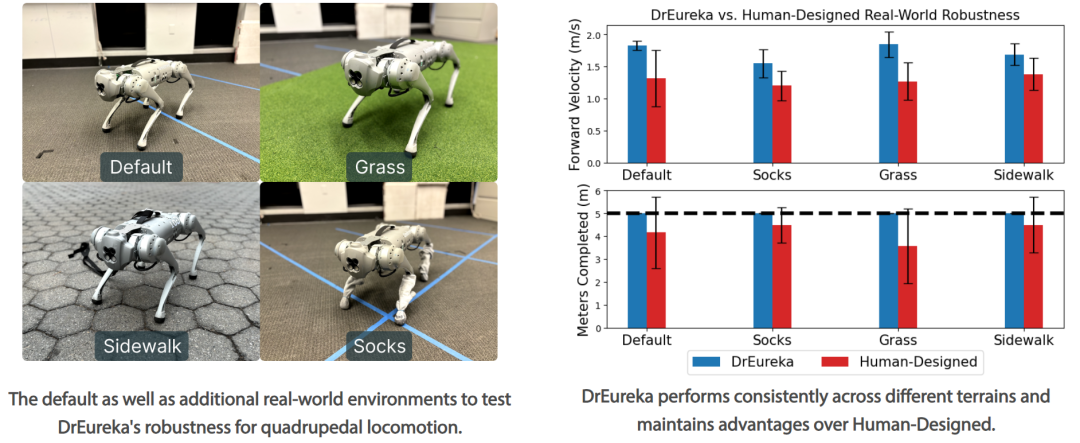
论文地址:https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf 项目主页:https://github.com/eureka-research/DrEureka 论文标题:DrEureka: Language Model Guided Sim-To-Real Transfer
以上是瑜伽球上遛「狗」!入选英伟达十大项目之一的Eureka有了新突破的详细内容。更多信息请关注PHP中文网其他相关文章!
本站声明
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系admin@php.cn

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

AI Hentai Generator
免费生成ai无尽的。

热门文章
R.E.P.O.能量晶体解释及其做什么(黄色晶体)
3 周前
By 尊渡假赌尊渡假赌尊渡假赌
R.E.P.O.最佳图形设置
3 周前
By 尊渡假赌尊渡假赌尊渡假赌
刺客信条阴影:贝壳谜语解决方案
2 周前
By DDD
R.E.P.O.如果您听不到任何人,如何修复音频
3 周前
By 尊渡假赌尊渡假赌尊渡假赌
WWE 2K25:如何解锁Myrise中的所有内容
3 周前
By 尊渡假赌尊渡假赌尊渡假赌
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)
热门话题



 Go语言中用于浮点数运算的库有哪些?
Apr 02, 2025 pm 02:06 PM
Go语言中用于浮点数运算的库有哪些?
Apr 02, 2025 pm 02:06 PM
Go语言中用于浮点数运算的库介绍在Go语言(也称为Golang)中,进行浮点数的加减乘除运算时,如何确保精度是�...
 Gitee Pages静态网站部署失败:单个文件404错误如何排查和解决?
Apr 04, 2025 pm 11:54 PM
Gitee Pages静态网站部署失败:单个文件404错误如何排查和解决?
Apr 04, 2025 pm 11:54 PM
GiteePages静态网站部署失败:404错误排查与解决在使用Gitee...
 Go语言中哪些库是由大公司开发或知名的开源项目提供的?
Apr 02, 2025 pm 04:12 PM
Go语言中哪些库是由大公司开发或知名的开源项目提供的?
Apr 02, 2025 pm 04:12 PM
Go语言中哪些库是大公司开发或知名开源项目?在使用Go语言进行编程时,开发者常常会遇到一些常见的需求,�...
 h5项目怎么运行
Apr 06, 2025 pm 12:21 PM
h5项目怎么运行
Apr 06, 2025 pm 12:21 PM
运行 H5 项目需要以下步骤:安装 Web 服务器、Node.js、开发工具等必要工具。搭建开发环境,创建项目文件夹、初始化项目、编写代码。启动开发服务器,使用命令行运行命令。在浏览器中预览项目,输入开发服务器 URL。发布项目,优化代码、部署项目、设置 Web 服务器配置。
 如何获取海外版的发货地区数据?有哪些现成的资源可以使用?
Apr 01, 2025 am 08:15 AM
如何获取海外版的发货地区数据?有哪些现成的资源可以使用?
Apr 01, 2025 am 08:15 AM
问题介绍:如何获取海外版的发货地区数据?是否有现成的资源可以使用?在跨境电商或全球化业务中,获取准...
 在Go语言中使用Redis Stream实现消息队列时,如何解决user_id类型转换问题?
Apr 02, 2025 pm 04:54 PM
在Go语言中使用Redis Stream实现消息队列时,如何解决user_id类型转换问题?
Apr 02, 2025 pm 04:54 PM
Go语言中使用RedisStream实现消息队列时类型转换问题在使用Go语言与Redis...
 Typecho路由匹配冲突:为什么我的/test/tag/你好/10086匹配到了TestTagIndex而不是TestTagPage?
Apr 01, 2025 am 09:03 AM
Typecho路由匹配冲突:为什么我的/test/tag/你好/10086匹配到了TestTagIndex而不是TestTagPage?
Apr 01, 2025 am 09:03 AM
Typecho路由匹配规则解析与问题排查本文将针对Typecho插件路由注册与实际匹配结果不一致的问题进行分析和解答�...
 Python沙漏图形绘制:如何避免变量未定义错误?
Apr 01, 2025 pm 06:27 PM
Python沙漏图形绘制:如何避免变量未定义错误?
Apr 01, 2025 pm 06:27 PM
Python入门:沙漏图形绘制及输入校验本文将解决一个Python新手在沙漏图形绘制程序中遇到的变量定义问题。代码...
